触知覚センシングにおける軟組織のダイナミクス・トライボロジー
本研究の目的は,人が触感覚を通して対象物の特性を知覚する過程を力学的に理解するとともに,触感覚に関する力学的な知見を基に柔らかい触覚センシングデバイスを開発することである.
本研究では,
に関する研究を進めた.
|
|
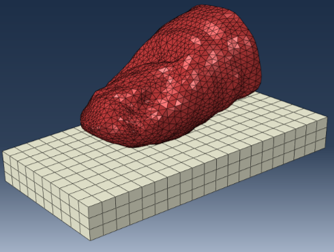
指先の力学モデリング
|
|

|
|
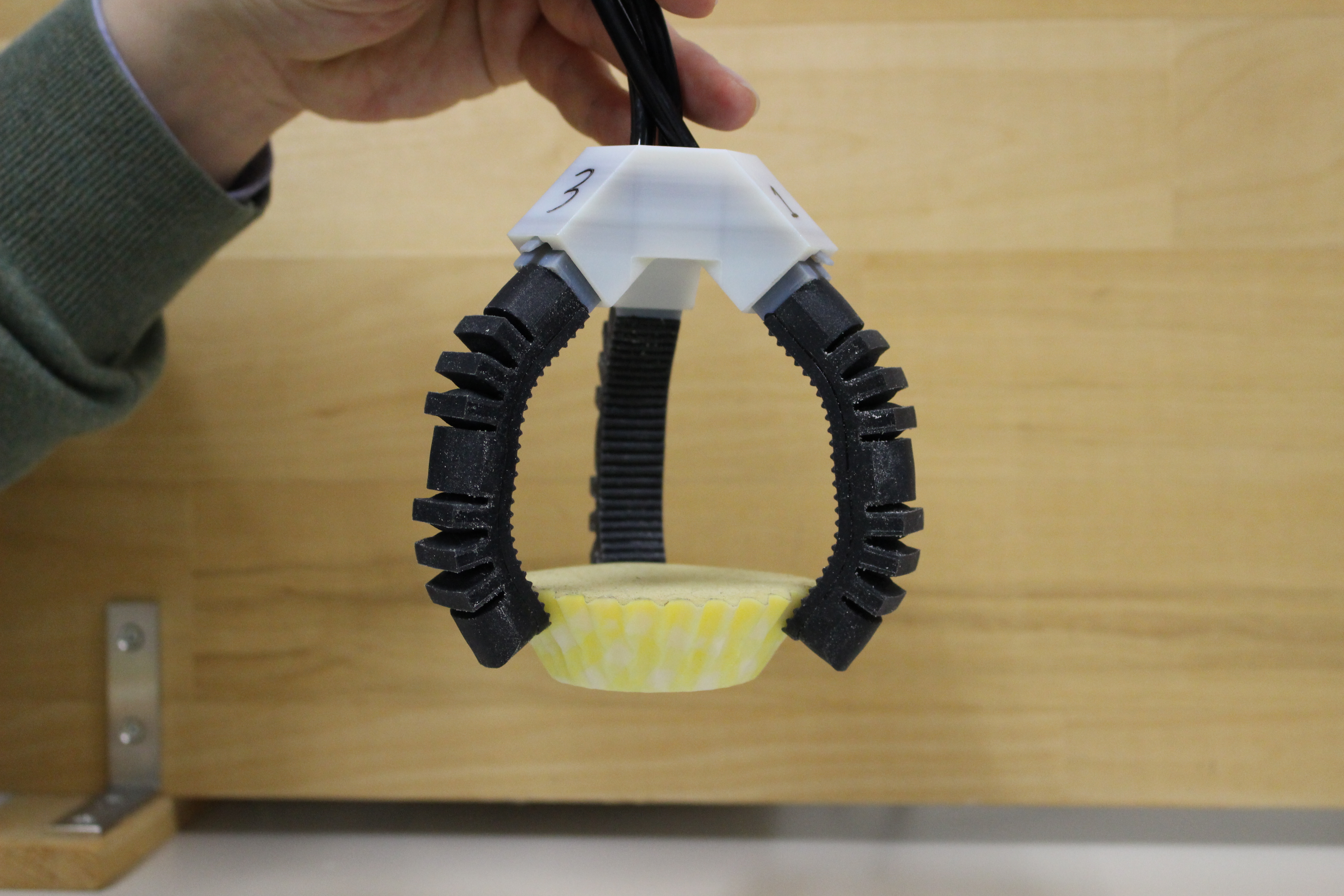
ソフトフィンガーの変形
|
|
|
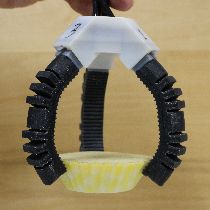
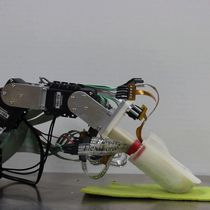
| ソフトグリッパー |
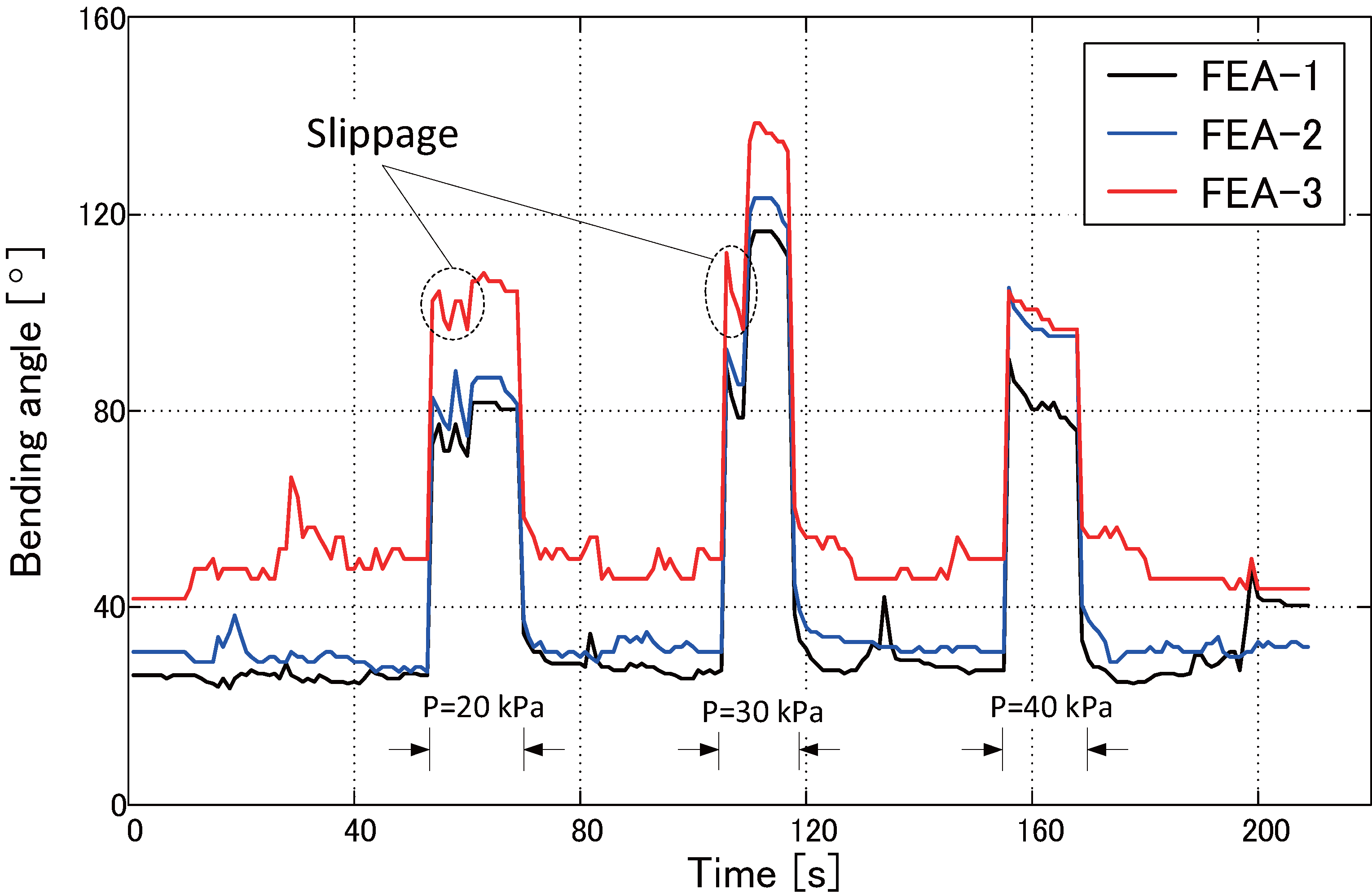
ソフトグリッパーにおける滑りの検出 |
|
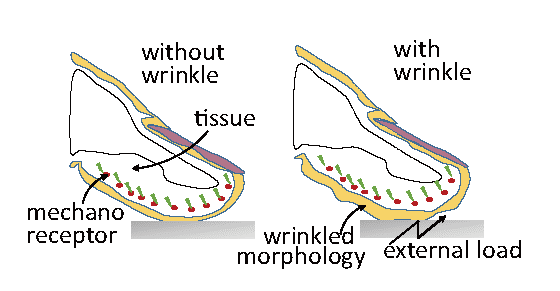
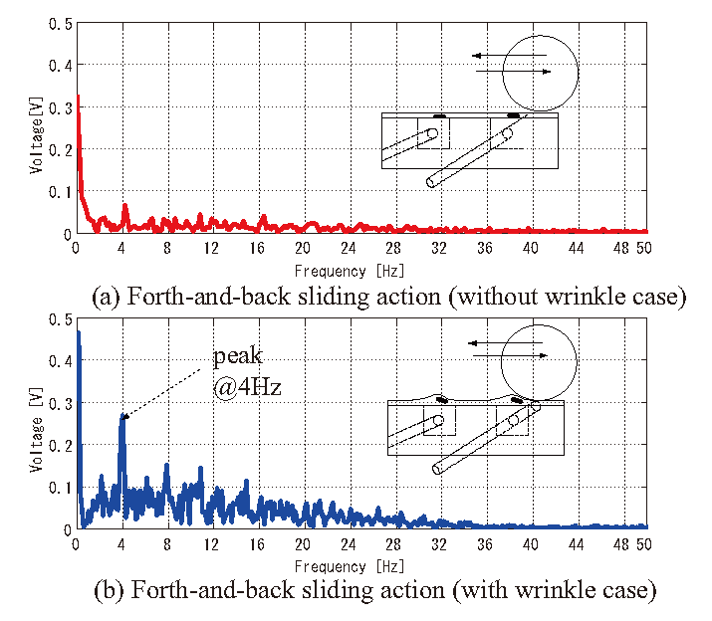
| しわ構造を用いた滑り覚センシング |
|
|
|

|
|
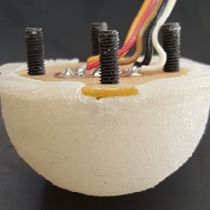
| センサ内蔵柔軟指 |
テクスチャーの識別 |
布地センサ |
ホール素子センサ |
(提案書 全文)
著書
著書(章)
- 平井 慎一,
2.3.7 柔軟体の力学モデリング,
松野 文俊, 大須賀 公一, 松原 仁, 野田 五十樹, 稲見 昌彦 eds., ロボット制御学ハンドブック, 978-4-7649-0473-6, 近代科学社, pp.75-79, Dec., 2017
論文
- Zhongkui Wang and Shinichi Hirai,
Soft Gripper Dynamics Using a Line-Segment Model with an Optimization-Based Parameter Identification Method,
IEEE Robotics and Automation Letters, Vol.2, Issue 2, pp.624-631, 10.1109/LRA.2017.2650149, Jan., 2017
- Zhongkui Wang, Yuuki Torigoe, and Shinichi Hirai,
A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling,
IEEE Robotics and Automation Letters, Vol.2, Issue 4, pp.1909-1916, 10.1109/LRA.2017.2714141, Oct., 2017
- Van Ho, Hideyasu Yamashita, Zhongkui Wang, Shinichi Hirai, and Koji Shibuya,
Wrin'Tac: Tactile Sensing System with Wrinkle's Morphological Change,
IEEE Transactions on Industrial Informatics, Vol.13, Issue 5, pp.2496-2506, 10.1109/TII.2017.2718660, June, 2017
- Zhongkui Wang, Mingzhu Zhu, Sadao Kawamura and Shinichi Hirai,
Comparison of different soft grippers for lunch box packaging,
Robotics and Biomimetics, Vol.4, No.10, 10.1186/s40638-017-0067-1, Nov., 2017
- Takahiro Matsuno, Zhongkui Wang, and Shinichi Hirai,
Grasping state estimation of printable soft gripper using electro-conductive yarn,
Robotics and Biomimetics, Vol.4, No.13, 10.1186/s40638-017-0072-4, Dec., 2017
- Van Ho, Hisayoshi Honda, and Shinichi Hirai,
Development of a Novel Slip Haptic Display Device Based on the Localized Displacement Phenomenon,
IEEE Robotics and Automation Letters, Vol.1, Issue 1, pp.585-592, 10.1109/LRA.2016.2524068, Feb., 2016
- Damith Suresh Chathuranga, Zhongkui Wang, Yohan Noh, Thrishantha Nanayakkara, and Shinichi Hirai,
Magnetic and Mechanical Modelling of a Soft Three-Axis Force Sensor,
IEEE Sensors Journal, Vol.16, Issue 13, pp.5298-5307, 10.1109/JSEN.2016.2550605, Apr., 2016
- Van Anh Ho and Shinichi Hirai,
Design and Analysis of a Soft-Fingered Hand with Contact Feedback,
IEEE Robotics and Automation Letters, Vol.2, Issue 2, pp.491-498, 10.1109/LRA.2016.2645120, Dec., 2016
- Van Anh Ho and Shinichi Hirai,
A Novel Model for Assessing Sliding Mechanics and Tactile Sensation of Human-Like Fingertips during Slip Action,
Robotics and Autonomous Systems, Vol.63, No.3, pp.253-267, 10.1016/j.robot.2014.09.009, Jan., 2015
- 田川 和義, 近江 奈帆子, 田中 弘美, 小森 優, 来見 良誠, 森川 茂廣,
多様なVR 術野構築のための漿膜・結合組織の半自動生成手法,
電子情報通信学会技術研究報告 115(25), 35-39, 2015
- Takahiro Inoue, Ryuichi Miyata, and Shinichi Hirai,
Fictitious Target-Trajectory Forming Control for Redundant Manipulator and Active Regulation of Impulsive Forces,
Journal of Robotics and Mechatronics, Vol.27, No.5, pp.552-562, Oct., 2015
国際会議
- Van Ho and Shinichi Hirai,
Design and Analysis of a Soft-Fingered Hand with Contact Feedback,
2017 IEEE Int. Conf. on Robotics and Automation (ICRA 2017), Sands Expo and Convention Centre, Singapore, May 29 - June 3, 2017
- Van Ho, Hideyasu Yamashita, Zhongkui Wang, Shinichi Hirai, and Koji Shibuya,
Morphological Computation in Tactile Sensing: The Role of Wrinkle,
2017 IEEE Int. Conf. on Robotics and Automation (ICRA 2017), Sands Expo and Convention Centre, Singapore, May 29 - June 3, 2017
- Zhongkui Wang and Shinichi Hirai,
Soft Gripper Dynamics Using a Line-Segment Model with Optimization-Based Parameter Identification Method,
2017 IEEE Int. Conf. on Robotics and Automation (ICRA 2017), Sands Expo and Convention Centre, Singapore, May 29 - June 3, 2017
- Zhongkui Wang, Kosuke Kadoma, and Shinichi Hirai,
An Indentation-type Instrument for Measuring Soft Tissue Elasticity,
Int. Conf. on Innovation in Medicine and Healthcare (KES-InMed-17), Anantara Vilamoura Algarve Resort, Vilamoura, Portugal, June 21-23, 2017
- Takahiro Matsuno, Zhongkui Wang, and Shinichi Hirai,
Real-time Curvature Estimation of Printable Soft Gripper using Electro-conductive Yarn,
2017 IEEE Int. Conf. on Real-time Computing and Robotics (IEEE RCAR 2017), pp.5-10, Southern Beach Hotel & Resort Okinawa, Itoman, Japan, July 14-18, 2017
Best Conference Paper Finalist
- Zhongkui Wang, Mingzhu Zhu, Sadao Kawamura, and Shinichi Hirai,
Fabrication and Performance Comparison of Different Soft Pneumatic Actuators for Lunch Box Packaging,
2017 IEEE Int. Conf. on Real-time Computing and Robotics (IEEE RCAR 2017), pp.22-27, Southern Beach Hotel & Resort Okinawa, Itoman, Japan, July 14-18, 2017
- Zhongkui Wang and Shinichi Hirai,
A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling,
2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2017), Vancouver Convention Centre, Vancouver, BC, Canada, Sept. 24-28, 2017
- Mingzhu Zhu, Wang Zhongkui, Sadao Kawamura and Shinichi Hirai,
Design and Fabrication of a Soft-bodied Gripper with Integrated Curvature Sensors,
2017 IEEE 24th Int. Conf. on Mechatronics and Machine Vision in Practice (M2VIP2017), Massey University, Auckland, New Zealand, Nov. 21-23, 2017 Best Paper Award
- Takahiro Matsuno and Shinichi Hirai,
Deformation Estimation of a Plate Spring Using Asymmetric and Symmetric Conductive Patterns,
2017 IEEE/SICE Int. Symp. on System Integration, Howard Plaza Hotel, Taipei, Taiwan, Dec. 11-14, 2017 Finalist for Best Conference Paper Award
- Van Ho, Hisayoshi Honda, and Shinichi Hirai,
Development of a Novel Slip Haptic Display Device Based on the Localized Displacement Phenomenon,
Proc. IEEE Int. Conf. on Robotics and Automation, pp.585-592, 10.1109/LRA.2016.2524068, Stockholm Waterfront Congress Center, Stockholm, Sweden, May 16-21, 2016
- Van Ho and Shinichi Hirai,
From Localized Shearing to Localized Slippage Perception,
2016 International Symposium on Experimental Robotics (ISER 2016), International House of Japan, Tokyo, Japan, Oct. 3-6, 2016
- Van Anh Ho, Shinichi Hirai, and Koki Naraki,
Fabric Interface with Proximity and Tactile Sensation for Human-Robot Interaction,
2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2016), pp.238-245, 10.1109/IROS.2016.7759061, Daejeon Convention Center, Daejeon, Korea, Oct. 9-14, 2016
- Hideyasu Yamashita, Van Anh Ho, Koji Shibuya, and Shinichi Hirai,
Morphological Computation in Tactile Sensing: A New Approach in Implementation,
2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2016), pp.3501-3502, Daejeon Convention Center, Daejeon, Korea, Oct. 9-14, 2016
- Damith Suresh Chathuranga, Zhongkui Wang, Yohan Noh, Thrishantha Nanayakkara, and Shinichi Hirai,
A Soft Three Axis Force Sensor Useful for Robot Grippers,
2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2016), pp.5556-5563, 10.1109/IROS.2016.7759817, Daejeon Convention Center, Daejeon, Korea, Oct. 9-14, 2016
- Zhongkui Wang, Damith Suresh Chathuranga, and Shinichi Hirai,
3D Printed Soft Gripper for Automatic Lunch Box Packing,
2016 IEEE Conf. on Robotics and Biomimetics (ROBIO 2016), pp.503-508, 10.1109/ROBIO.2016.7866372, Shangri-La Hotel, Qingdao, China, Dec. 3-7, 2016
- Van Anh Ho, Hideyasu Yamashita, Koji Shibuya, Zhongkui Wang, Shinichi Hirai, Junya Nagase, and Kazuyoshi Tsutsumi,
Function-Selectable Tactile Sensing System with Morphological Change,
Proc. 2016 IEEE/SICE Int. Symp. on System Integration (SII 2016), pp.415-420, 10.1109/SII.2016.7844034, Sapporo Convention Center, Sapporo, Japan, Dec. 13-15, 2016 Finalist of Best Conference Paper Award
- Zhongkui Wang and Shinichi Hirai,
A 3D Printed Soft Gripper Integrated with Curvature Sensor for Studying Soft Grasping,
Proc. 2016 IEEE/SICE Int. Symp. on System Integration (SII 2016), pp.629-633, 10.1109/SII.2016.7844069, Sapporo Convention Center, Sapporo, Japan, Dec. 13-15, 2016
- Damith Suresh Chathuranga, Zhongkui Wang, and Shinichi Hirai,
An Anthropomorphic Tactile Sensor System with its Applications in Dexterous Manipulations,
5th Annual IEEE Int. Conf. on CYBER Technology in Automation, Control, and Intelligent Systems, pp.1085-1090, 10.1109/CYBER.2015.7288096, Shenyang Royal Wanxin Hotel, Shenyang, China, June 8-12, 2015
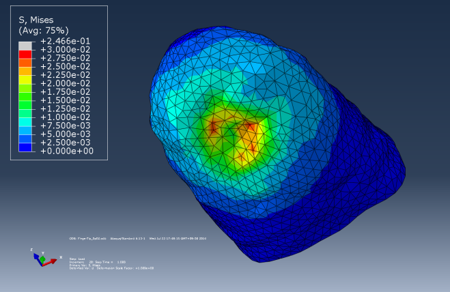
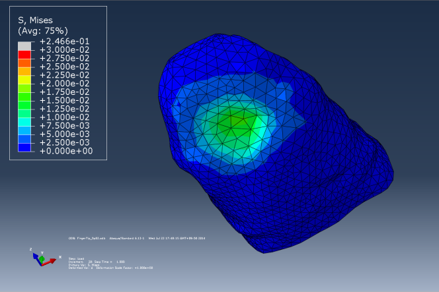
- Zhongkui Wang, Damith Suresh Chathuranga, and Shinichi Hirai,
Study on Fingertip Slippage using FE Model for Developing Human-Like Tactile Sensor,
2015 Int. Conf. on Real-time Computing and Robotics (RCAR 2015), Empark Grand Hotel, Changsha, China, June 23-26, 2015 Finalist for Best Conference Paper Award
- Wang Zhongkui, Damith Suresh Chathuranga Katudampe Vithanage, and Shinichi Hirai,
Study on the Human Perception of Incipient and Overall Slippages Using A 2D FE Fingertip Model,
The 37th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2015), 10.1109/EMBC.2015.7319702, MiCo - Milano Congressi, Milano, Italy, Aug. 25-29, 2015
- Damith Suresh Chathuranga Katudampe Vithanage, Wang Zhongkui, Yohan Noh, Thrishantha Nanayakkara, and Shinichi Hirai,
Disposable Soft 3 Axis Force Sensor for Biomedical Applications,
The 37th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2015), 10.1109/EMBC.2015.7319642, MiCo - Milano Congressi, Milano, Italy, Aug. 25-29, 2015
- Helge Arne Wurdemann, Sina Sareh, Ali Shafti, Yohan Noh, Angela Faragasso, Damith Suresh Chathuranga Katudampe Vithanage, Hongbin Liu, Shinichi Hirai, and Kaspar Althoefer,
Embedded Electro-Conductive Yarn for Shape Sensing of Soft Robotic Manipulators,
The 37th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2015), 10.1109/EMBC.2015.7320255, MiCo - Milano Congressi, Milano, Italy, Aug. 25-29, 2015
- Van Anh Ho and Shinichi Hirai,
Measuring McKibben Actuator Shrinkage using Fiber Sensor,
The 24th Int. Symp. on Robot and Human Interactive Communication (RO-MAN 2015), 10.1109/ROMAN.2015.7333585, Kobe Int. Conf. Center, Kobe, Japan, Aug. 31 - Sept. 4, 2015
- Damith Suresh Chathuranga Katudampe Vithanage, Zhongkui Wang, Yohan Noh, Thrishantha Nanayakkara, and Shinichi Hirai,
Robust Real Time Material Classification Algorithm Using Soft Three Axis Tactile Sensor: Evaluation of the Algorithm,
2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), 10.1109/IROS.2015.7353655, Congress Center Hamburg (CCH), Hamburg, Germany, Sept. 28 - Oct. 2, 2015
- Kazuyoshi Tagawa, Takahiro Yamada, Hiromi T. Tanaka,
A Study on Corotated Deformation Model for Simulating Soft Tissue in Large Deformation,
Innovation in Medicine and Healthcare 2015 (InMed 2015), Ritsumeikan University (Suzaku Campus), pp.333-343, Kyoto, Japan, Sept. 11-12, 2015
- Takahiro Inoue, Sizuka Yamamoto, Ryuichi Miyata, and Shinichi Hirai,
A Robotic Joint Design by Agonist and Antagonist Arrangement with Twisting Small-Diameter Round-Belts,
2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2015), 10.1109/IROS.2015.7353604, Congress Center Hamburg (CCH), Hamburg, Germany, Sept. 28 - Oct. 2, 2015
口頭発表
- 山田 寛大, 平井 慎一,
静電容量式力センサを有するロボットハンドによる把持,
ロボティクス・メカトロニクス講演会2017, 郡山市・ビッグパレットふくしま, May 10-13, 2017
- 森川 茂廣, 王 忠奎, 平井 慎一,
力学データに基づく口腔ケアの訓練・評価システムの開発に向けた歪ゲージを用いた歯列モデルの作製,
第5回看護理工学会学術集会, 金沢市・金沢大学 宝町キャンパス, Oct. 14-15, 2017
- Zhongkui Wang and Shinichi Hirai,
Soft Robotic Gripper for Packaging of Japanese Lunch Box,
13th Joint Workshop on Machine Perception and Robotics (MPR2017), Lee Shau Kee Institute of Humanities, Peking University, China, Oct. 16-17, 2017
- Takahiro Matusno, Zhongkui Wang, and Shinichi Hirai,
Grasping State Sensing of Soft Gripper for Food Handling,
13th Joint Workshop on Machine Perception and Robotics (MPR2017), Lee Shau Kee Institute of Humanities, Peking University, China, Oct. 16-17, 2017
- 井上 貴浩, 濱野 祐哉, 平井 慎一,
半球型柔軟指の指先力減衰特性,
ロボティクス・メカトロニクス講演会2016, 横浜市・パシフィコ横浜, June 8-11, 2016
- Chathuranga Damith Suresh, 平井 慎一,
ホール素子を用いた柔軟指内蔵力覚センサ,
第34回日本ロボット学会学術講演会(RSJ2016), 山形市・山形大学 小白川キャンパス, Sept. 7-9, 2016
- Damith Suresh Chathuranga and Shinichi Hirai,
Soft 3D Tactile Sensor for Artificial Fingertips - Design, Fabrication and Testing of the Sensor -,
Robotics and Mechatronics Conference 2015, Miyakomesse, Kyoto, Japan, May 17-19, 2015
- 平井 慎一,
生体力学モデルと生体シミュレーション,
第3回看護理工学会学術集会, 立命館大学朱雀キャンパス, Oct. 10-11, 2015
- 王 忠奎, ダミス スレス チャテュランガ, 平井 慎一,
高齢者口腔ケアシミュレータを開発するための歯磨きの有限要素モデリングとシミュレーション,
第3回看護理工学会学術集会, 立命館大学朱雀キャンパス, Oct. 10-11, 2015
- ダミス スレス チャテュランガ, 王 忠奎, 平井 慎一,
バイオメディカル応用のための使い捨て3軸力センサ,
第3回看護理工学会学術集会, 立命館大学朱雀キャンパス, Oct. 10-11, 2015
- 栗木 涼, 田川 和義, 田中 弘美,
オンラインリメッシュ型有限要素法変形計算のための最適な行列保持法の選定,
日本VR学会,第16回力触覚の提示と計算研究会,2015
- 森川 茂廣, 山田 篤史, 仲 成幸, 村上 耕一郎, 谷 徹,
高磁場MR装置を用いたMR画像・超音波画像併用穿刺支援ロボットシステム,
第15回日本術中画像情報学会, 東京サイエンスセンター, 2015
- 田川 和義, 田中 弘美, 小森 優, 来見 良誠, 森川茂廣,
多地点協働手術シミュレータの開発と実地試用,
第3回看護理工学会学術集会, 立命館大学朱雀キャンパス, Oct. 10-11, 2015
- Ryo Kuriki, Kazuyoshi Tagawa, and Hiromi T. Tanaka,
Toward an adaptive embedded co-rotated and CSR-FEM based soft-tissue simulation with binary online re-mesh model,
In Proc. of Machine Perception and Robotics, Fukuoka, Japan, 2015
- Noriko Tani, Kazuyoshi Tagawa, and Hiromi T. Tanaka,
Hierarchical collision simulation between rigid and elastic embedded objects for realistic haptic rendering,
In Proc. of Machine Perception and Robotics, Fukuoka, Japan, 2015
- 井上 貴浩, 平井 慎一,
多関節アームへの衝撃的荷重の負荷と解放時の振動抑制手法,
第58回自動制御連合講演会, 神戸大学, Nov. 14-15, 2015
{kind=link}
{kind=link}
{kind=link}