指先の滑り覚の力学的解析
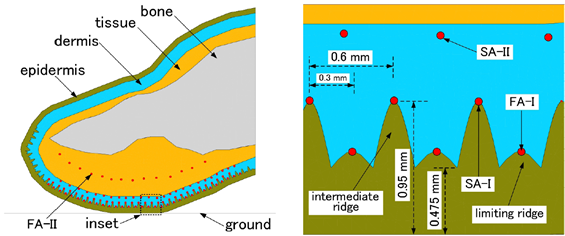
皮膚における触覚受容器の配置が触覚に与える影響を解析するために,3次元モデルの断面から指先の2次元力学モデルを構築した(図4).モデルの次元を減らしたのは,計算時間を短縮するためである.一方,皮膚を表皮と真皮に分割するとともに,表皮と真皮の境界面のマイクロ構造を導入した.さらに,触覚受容器のFA-I, FA-II, SA-I, SA-IIを指モデルの内部に配置した.
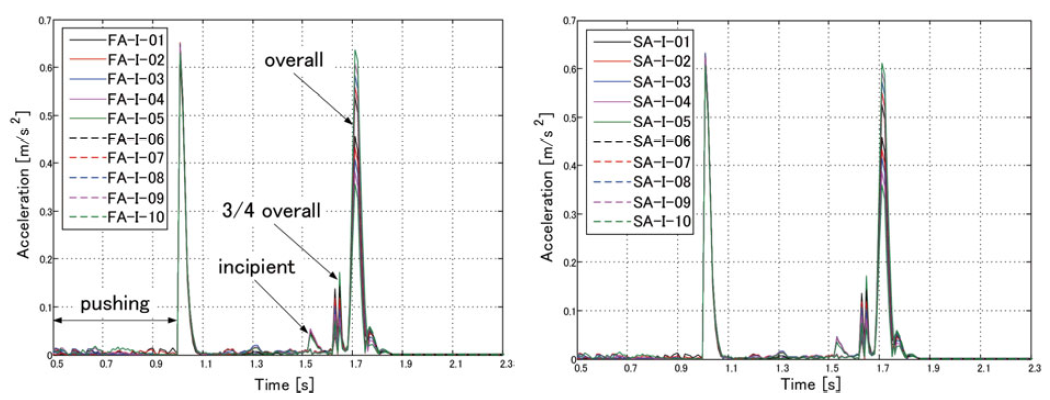
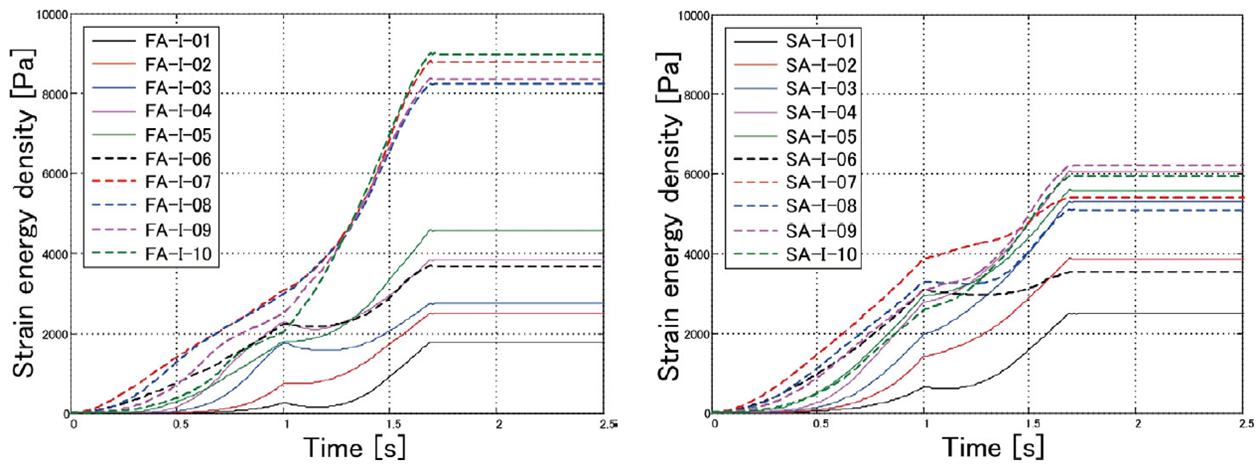
構築した二次元モデルが表面に接触し,その上を滑るダイナミックシミュレーションを実施した.力学シミュレーションの結果,受容器FA-IとSA-Iの場所で,初期滑りの瞬間に加速度が生じることがわかった(図5).一方,滑りの検出に有効であると言われている触覚受容器における歪みエネルギー密度を計算した結果,歪みエネルギー密度を用いて初期滑りを検出することは困難であることがわかった(図6).また,末節骨の形状が,初期滑りの瞬間に生じる加速度に影響すること,指紋を導入すると加速度信号にノイズが発生し,滑りの検出が困難であることがわかった.
|
|
図4 指先の二次元モデル
|
|
|
図5 FA-IとSA-Iにおける加速度
|
|
|
図6 FA-IとSA-Iにおける歪みエネルギー密度
|
指先の力学モデリングと滑り覚の力学的解析
- Zhongkui Wang, Damith Suresh Chathuranga, and Shinichi Hirai,
Study on Fingertip Slippage using FE Model for Developing Human-Like Tactile Sensor,
2015 Int. Conf. on Real-time Computing and Robotics (RCAR 2015), Empark Grand Hotel, Changsha, China, June 23-26, 2015 Finalist for Best Conference Paper Award
- Wang Zhongkui, Damith Suresh Chathuranga Katudampe Vithanage, and Shinichi Hirai,
Study on the Human Perception of Incipient and Overall Slippages Using A 2D FE Fingertip Model,
The 37th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2015), 10.1109/EMBC.2015.7319702, MiCo - Milano Congressi, Milano, Italy, Aug. 25-29, 2015
初期滑りの提示
- Van Ho, Hisayoshi Honda, and Shinichi Hirai,
Development of a Novel Slip Haptic Display Device Based on the Localized Displacement Phenomenon,
IEEE Robotics and Automation Letters, Vol.1, Issue 1, pp.585-592, 10.1109/LRA.2016.2524068, Feb., 2016
- Van Ho, Hisayoshi Honda, and Shinichi Hirai,
Development of a Novel Slip Haptic Display Device Based on the Localized Displacement Phenomenon,
Proc. IEEE Int. Conf. on Robotics and Automation, pp.585-592, 10.1109/LRA.2016.2524068, Stockholm Waterfront Congress Center, Stockholm, Sweden, May 16-21, 2016
- Van Ho and Shinichi Hirai,
From Localized Shearing to Localized Slippage Perception,
2016 International Symposium on Experimental Robotics (ISER 2016), International House of Japan, Tokyo, Japan, Oct. 3-6, 2016
生体モデリング
- Zhongkui Wang, Kosuke Kadoma, and Shinichi Hirai,
An Indentation-type Instrument for Measuring Soft Tissue Elasticity,
Int. Conf. on Innovation in Medicine and Healthcare (KES-InMed-17), Anantara Vilamoura Algarve Resort, Vilamoura, Portugal, June 21-23, 2017
- 田川 和義, 近江 奈帆子, 田中 弘美, 小森 優, 来見 良誠, 森川 茂廣,
多様なVR 術野構築のための漿膜・結合組織の半自動生成手法,
電子情報通信学会技術研究報告 115(25), 35-39, 2015
- Kazuyoshi Tagawa, Takahiro Yamada, Hiromi T. Tanaka,
A Study on Corotated Deformation Model for Simulating Soft Tissue in Large Deformation,
Innovation in Medicine and Healthcare 2015 (InMed 2015), Ritsumeikan University (Suzaku Campus), pp.333-343, Kyoto, Japan, Sept. 11-12, 2015