三次元プリンタを用いたソフトフィンガーの構築
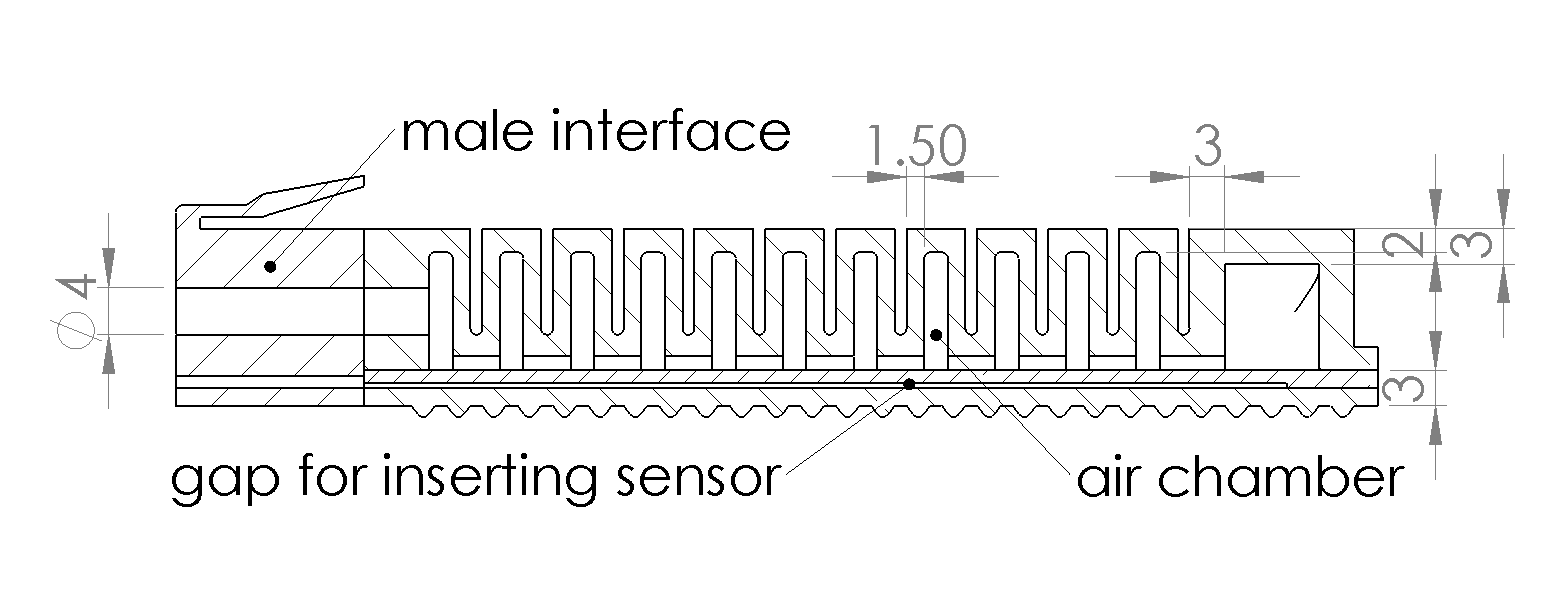
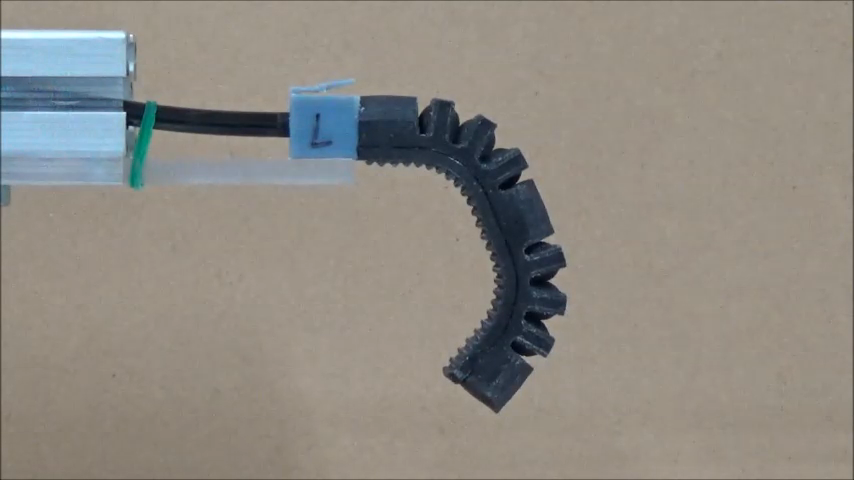
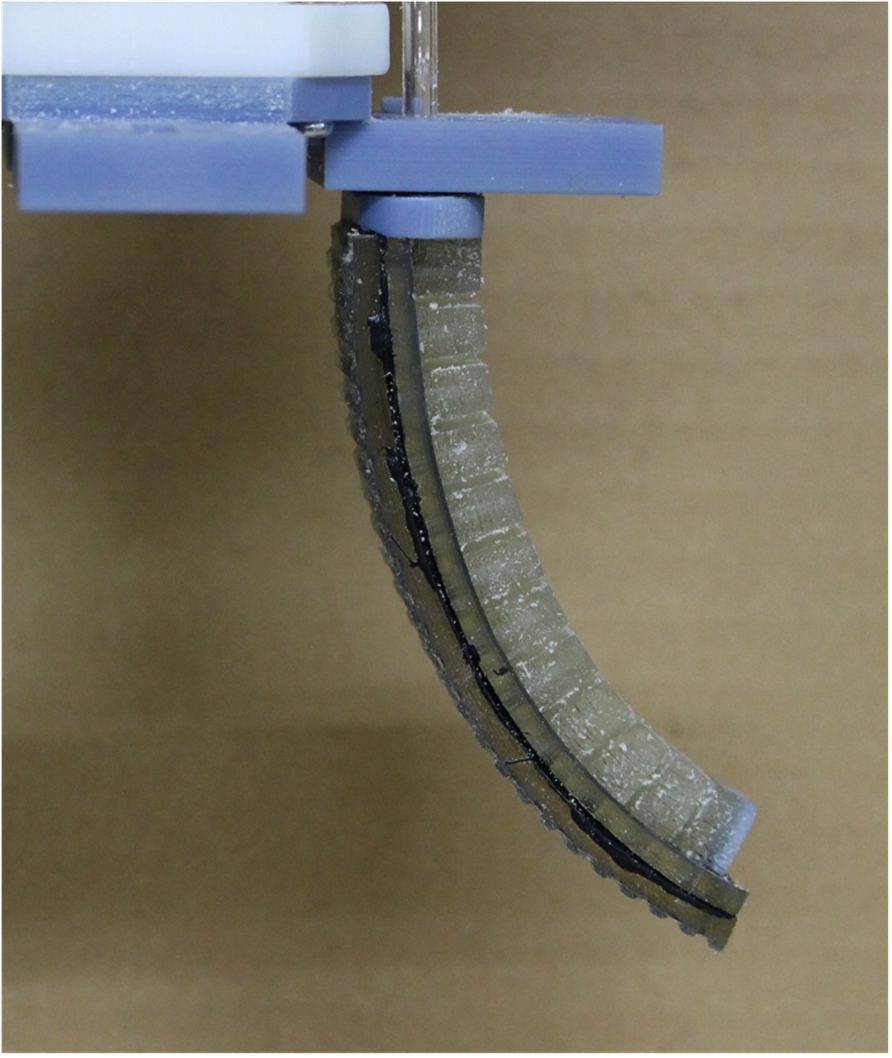
触覚を有し,様々な対象物を把持・操作できるロボットハンドを実現するためには,柔らかい材料で構成されたソフトフィンガーの導入が有効と考える.そこで,三次元プリンタを用いて空気圧駆動のソフトフィンガーを製作し,複数の指から成るソフトハンドを試作した.ソフトフィンガーは,複数のチャンバーを有しており,空気圧を印加すると一方向に屈曲する.図7に示すソフトフィンガーを設計し,三次元プリンタで試作した.左側から空気圧を印加すると,複数のチャンバーが膨張し,たがいに押し合う.結果として,下方に曲がる.図8に試作したソフトフィンガーの曲げ変形を示す.左側から順に,0kPa,20kPa,30kPa,40kPa,50kPaの空気圧を加圧したときの曲げ変形を示す.印加する空気圧に応じて,曲げ変形が生じていることがわかる.
|
|
図7 ソフトフィンガーの構造
|

|
|
図8 ソフトフィンガーの曲げ変形
(0kPa,20kPa,30kPa,40kPa,50kPaを加圧)
|
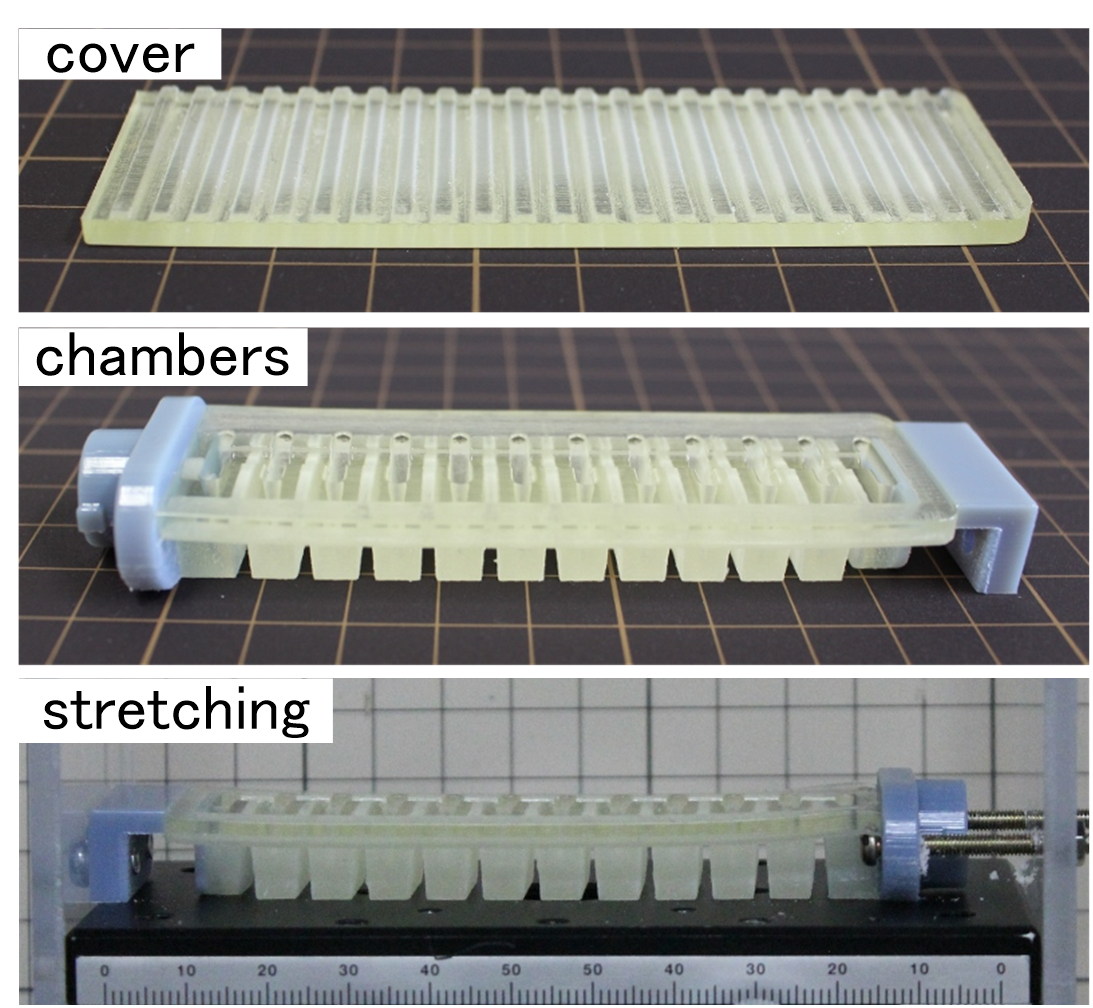
三次元プリンタを用いることにより,様々な構造のソフトフィンガーを容易に試作することができる.チャンバーの形状や配置,チャンバーの材料のヤング率により,ソフトフィンガーの変形後の形状が異なる.マルチマテリアルに対応し,ラバーライク材料を用いることができる三次元プリンタは,ヤング率が異なる複数の材料から成るフィンガーを試作することが可能である.そこで,様々なチャンバーの配置,材料のヤング率を有するフィンガーを試作した.

|
|
|
|
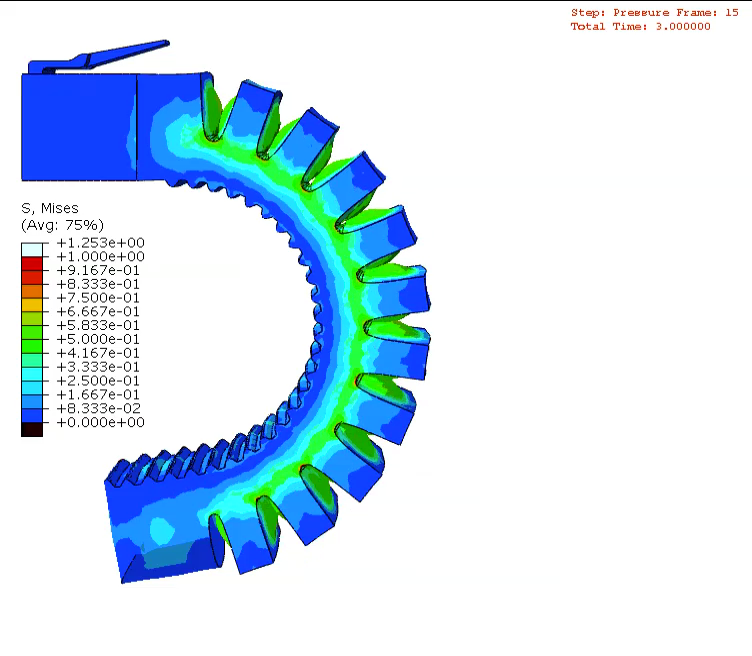
(a) チャンバーが一様に分布するデザイン
|

|
|
|
|
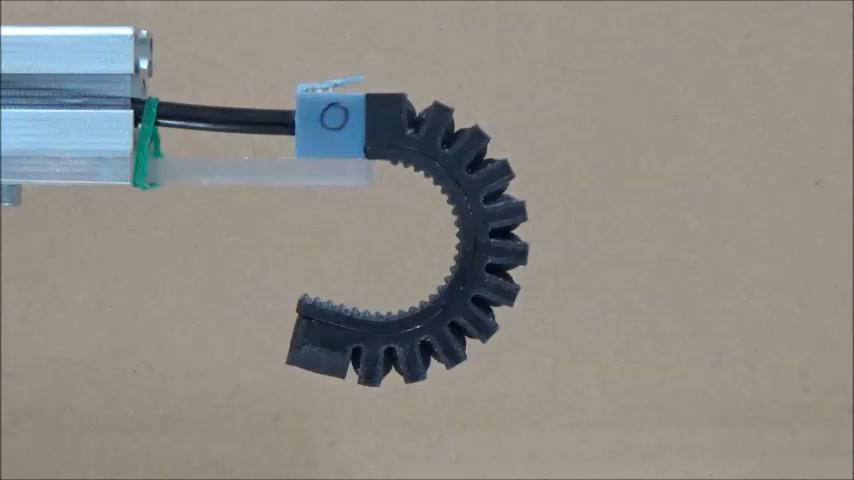
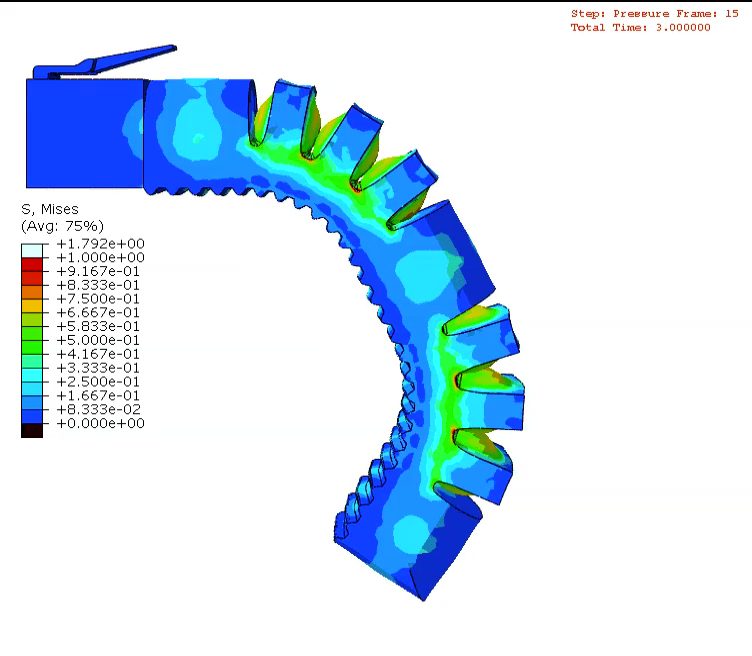
(b) チャンバーが非一様に分布するデザイン
|

|
|
|
|
(c) チャンバーが異なる複数の材料から成るデザイン
|
|
図9 様々な構造のソフトフィンガー
|
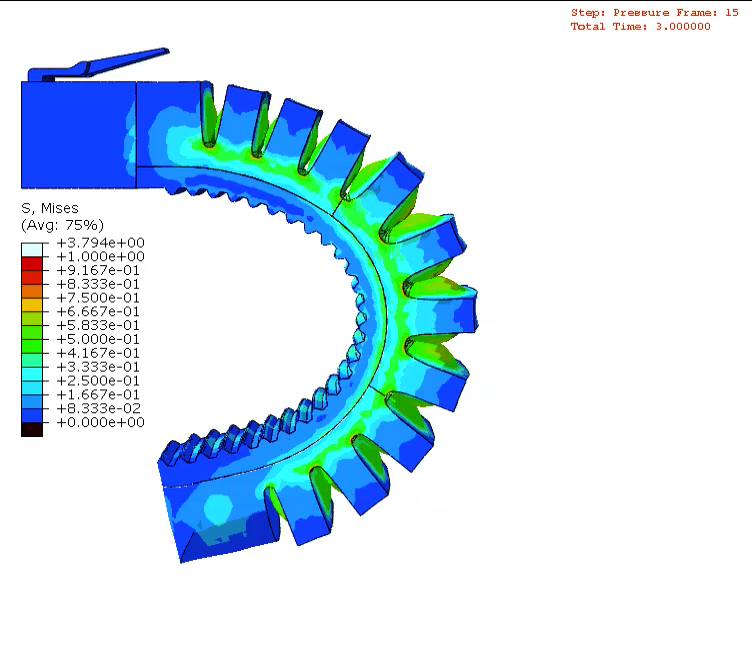
図9に様々な構造のソフトフィンガーを示す.図9(a)は,チャンバーが一様に分布するデザインであり,空気圧を印加すると一様に曲がる.すなわち,変形後の形状は円弧に近い.図9(b)は,チャンバーが非一様に分布するデザインである.空気圧を印加すると,チャンバーが密な個所では大きく曲がり,チャンバーが疎な個所ではあまり曲がらない.この場合,ソフトフィンガーの変形は,リンク機構の変形形状に近くなる.図9(c)は,チャンバーが異なる複数の材料から成るデザインである.この場合,チャンバーは三つの異なる硬さを持つ.柔らかい材料から成るチャンバーの部分が大きく変形する.この場合,中央部で大きい曲げ変形が生じている.以上のように,実験により得られたフィンガーの変形形状が有限要素シミュレーションの結果と一致することを確認した.
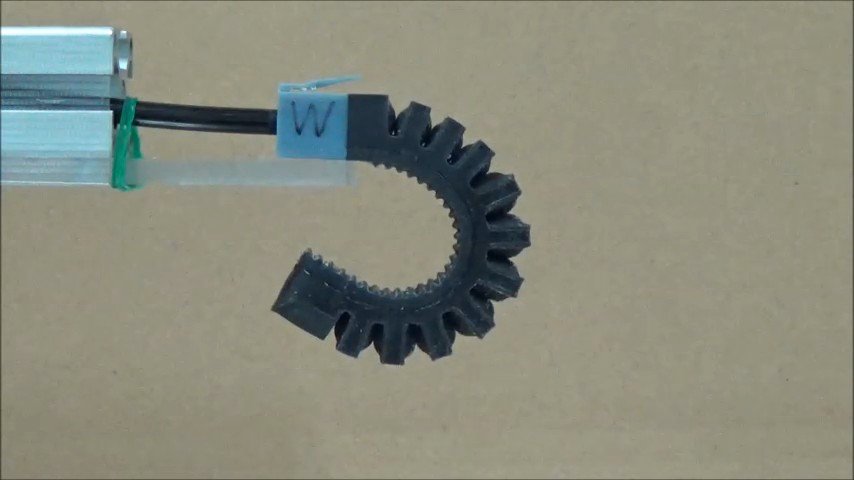
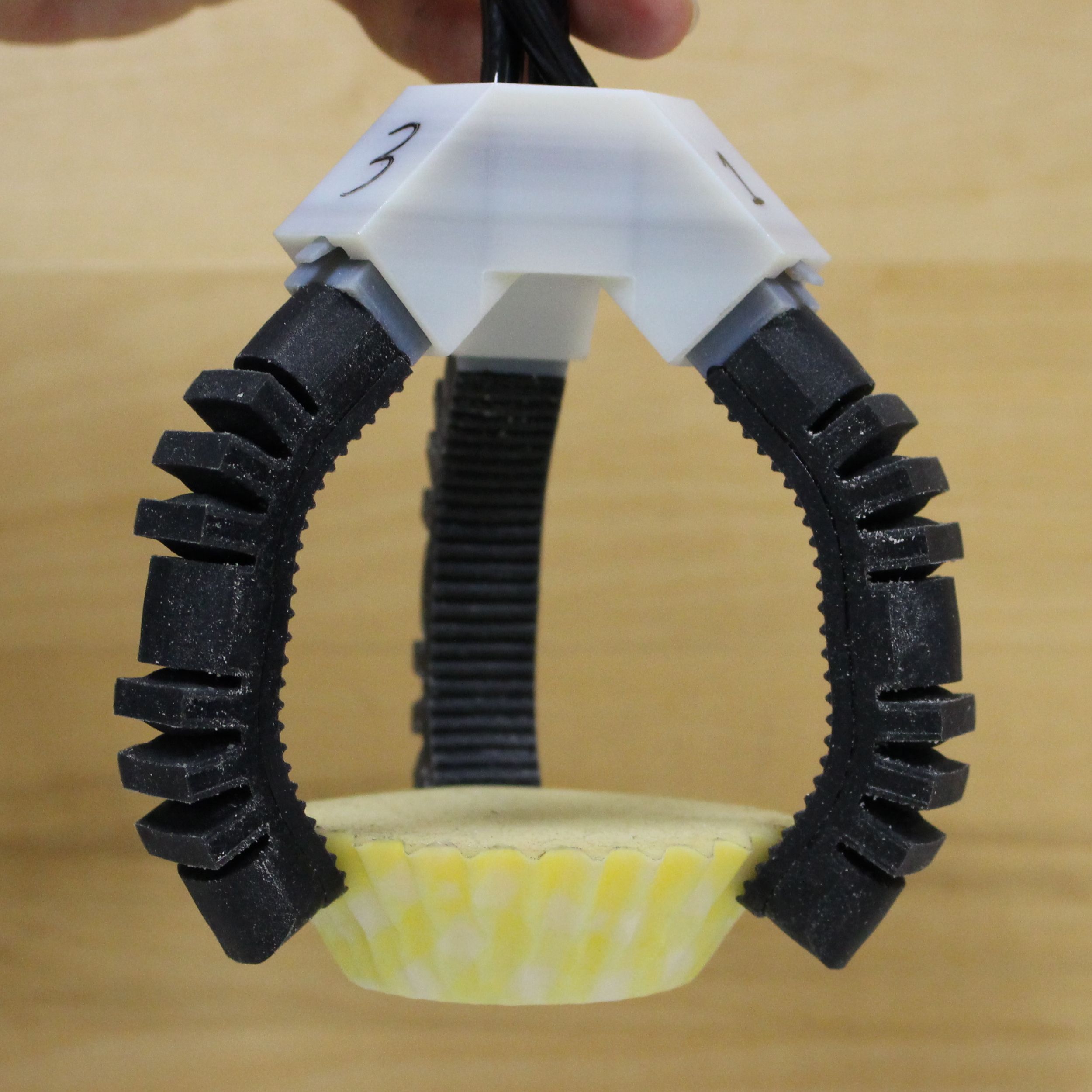
対象物にハンドが接近する段階では,外側に開いた指を有するハンドが望ましい.初期形状で外側に曲がった指を実現するために,プレストレッチ指(図10)を提案した.プレストレッチ指は,空気圧駆動の指とフィルムから成る(図10左).フィルムは,指の自然長より長い.また,フィルムには曲げ変形が生じるが,伸縮はほとんど生じない.フィルムと同じ長さまで指を伸ばし,その状態で指とフィルムを接着する(図10中央).指の伸び変形を解放すると,フィルムが指側に曲がる(図10右).これが,プレストレッチ指の自然形状である.試作したプレストレッチ指を図11に示す.

|
|
図10 プレストレッチ指
(左:空気圧駆動の指とフィルム.中央:指を伸ばした状態でフィルムと接着.右:プレストレッチ指の自然状態における形状.)
|
|
|
|
図11 プレストレッチ指の試作
|
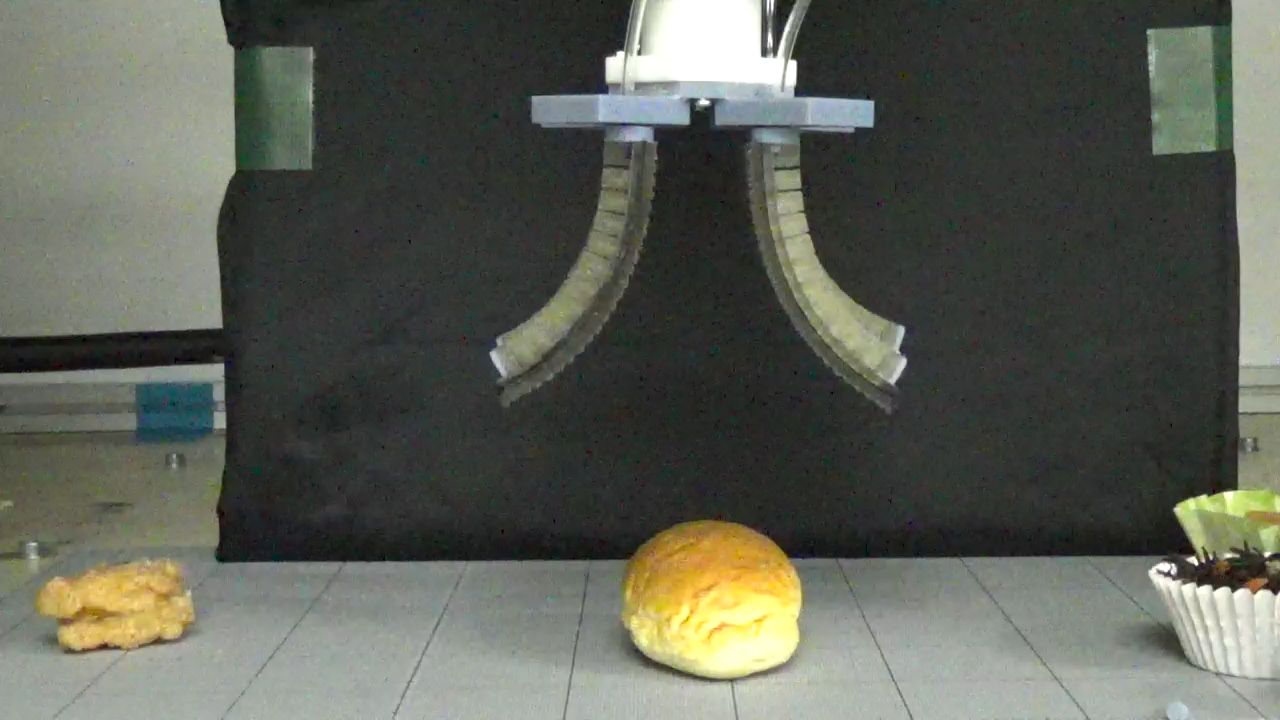
複数のソフトフィンガーから成るソフトハンドを構築した.チャンバーが一様に分布するソフトフィンガーから成るソフトハンドを図12に示す.プレストレッチ指から構成されるソフトハンドによる柔軟物体の摘み上げを図13に示す.異なる形状の柔軟物体を,ソフトハンドで摘み上げることができた.
|
|
図12 チャンバーが一様に分布するソフトフィンガーから成るソフトハンド
|
|

|
|
図13 ソフトハンドによる柔軟物体の把持
|
ソフトハンドによる柔軟対象物の把持
- Zhongkui Wang, Mingzhu Zhu, Sadao Kawamura and Shinichi Hirai,
Comparison of different soft grippers for lunch box packaging,
Robotics and Biomimetics, Vol.4, No.10, 10.1186/s40638-017-0067-1, Nov., 2017
- Zhongkui Wang, Damith Suresh Chathuranga, and Shinichi Hirai,
3D Printed Soft Gripper for Automatic Lunch Box Packing,
2016 IEEE Conf. on Robotics and Biomimetics (ROBIO 2016), pp.503-508, 10.1109/ROBIO.2016.7866372, Shangri-La Hotel, Qingdao, China, Dec. 3-7, 2016
- Zhongkui Wang, Mingzhu Zhu, Sadao Kawamura, and Shinichi Hirai,
Fabrication and Performance Comparison of Different Soft Pneumatic Actuators for Lunch Box Packaging,
2017 IEEE Int. Conf. on Real-time Computing and Robotics (IEEE RCAR 2017), pp.22-27, Southern Beach Hotel & Resort Okinawa, Itoman, Japan, July 14-18, 2017
プレストレッチ指から成るソフトハンド
- Zhongkui Wang, Yuuki Torigoe, and Shinichi Hirai,
A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling,
IEEE Robotics and Automation Letters, Vol.2, Issue 4, pp.1909-1916, 10.1109/LRA.2017.2714141, Oct., 2017
- Zhongkui Wang and Shinichi Hirai,
A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling,
2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2017), Vancouver Convention Centre, Vancouver, BC, Canada, Sept. 24-28, 2017