しわ構造を用いた滑り覚センシング
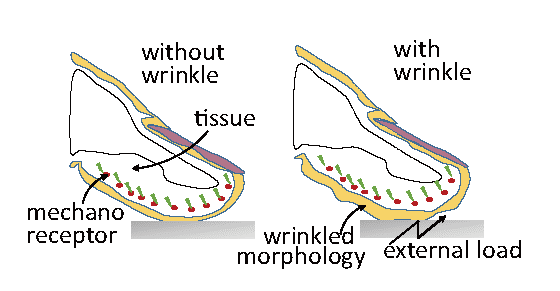
人の指先が濡れた状態にあると,皮膚にしわを生じる.このしわは,濡れた状態での把持を確実にするとともに,触覚を鋭敏にすると言われている.そこで指先のしわ構造(図16)を用いた滑り覚センシングを試みた.
|
|
図16 指先のしわ構造
|
|
|
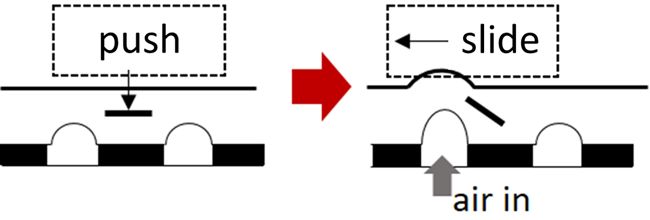
図17 適応的なしわ構造
|
しわ構造を実現するために,空気圧チャンバーを有する構造(図17)をエラストマーで試作した.隣り合うチャンバーの間に,歪みゲージを埋め込む.歪みゲージは表面に平行であり,エラストマーの表面に作用する鉛直荷重に反応する.一方,接線方向の荷重には,ほとんど反応しない.ここで,一方のチャンバーに空気圧を印加すると,チャンバーが膨張し,チャンバーが埋め込まれている部分にしわが生じる.これと同時に歪みゲージの向きが斜めに変わるため,歪みゲージは接線方向の荷重に反応する.このように,個々のチャンバーに空気圧を印加するかどうかにより,それぞれの歪みゲージの鉛直荷重に対する応答と接線方向の荷重に対する応答を変化させることができる.
|
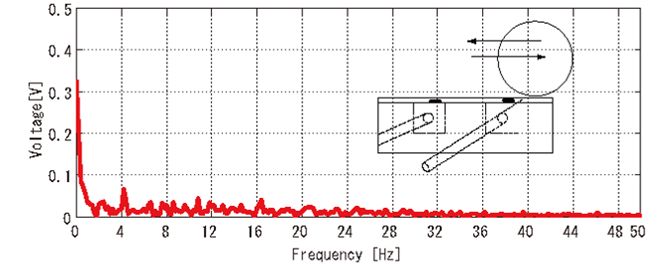
| (a) しわ構造がない場合 |
|
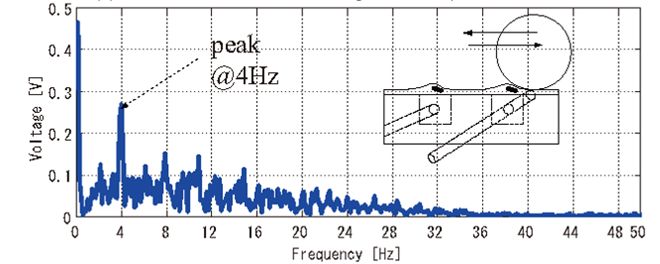
| (b) しわ構造がある場合 |
|
図18 しわ構造を用いた滑り覚センシング
(a) しわ構造がない場合,滑り運動を検出できない.(b) しわ構造によりセンサ素子の方向を変化させると,滑り運動を検出することができる.
|
空気圧を印加せずしわがない状態,空気圧を印加ししわがある状態において表面上で物体を周波数4Hzの往復運動で滑らせる.センサ信号をフーリエ変換し,振幅スペクトルを計算した(図18).しわ構造がない場合,明瞭なピークは現れず,滑り運動を検出できない(図18(a)).一方,しわ構造を有する場合,振幅スペクトルは周波数4Hzで明瞭なピークを示す(図18(b)).このように,しわ構造を用いることにより,滑り運動を検出することができる.
しわ構造を実現する方法として,空気圧等の外部エネルギーを用いる手法のみならず,プレストレッチ指と同様に曲げ変形エネルギーと伸縮変形エネルギーを用いる手法が考えられる.このような観点から,フィンガーの表面形状を変化させる方式を提案し,微分幾何法に基づきその力学モデルを構築した.
しわ構造を用いた滑り運動の検出
- Van Ho, Hideyasu Yamashita, Zhongkui Wang, Shinichi Hirai, and Koji Shibuya,
Wrin'Tac: Tactile Sensing System with Wrinkle's Morphological Change,
IEEE Transactions on Industrial Informatics, Vol.13, Issue 5, pp.2496-2506, 10.1109/TII.2017.2718660, June, 2017
- Hideyasu Yamashita, Van Anh Ho, Koji Shibuya, and Shinichi Hirai,
Morphological Computation in Tactile Sensing: A New Approach in Implementation,
2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2016), pp.3501-3502, Daejeon Convention Center, Daejeon, Korea, Oct. 9-14, 2016
- Van Anh Ho, Hideyasu Yamashita, Koji Shibuya, Zhongkui Wang, Shinichi Hirai, Junya Nagase, and Kazuyoshi Tsutsumi,
Function-Selectable Tactile Sensing System with Morphological Change,
Proc. 2016 IEEE/SICE Int. Symp. on System Integration (SII 2016), pp.415-420, 10.1109/SII.2016.7844034, Sapporo Convention Center, Sapporo, Japan, Dec. 13-15, 2016 Finalist of Best Conference Paper Award
- Van Ho, Hideyasu Yamashita, Zhongkui Wang, Shinichi Hirai, and Koji Shibuya,
Morphological Computation in Tactile Sensing: The Role of Wrinkle,
2017 IEEE Int. Conf. on Robotics and Automation (ICRA 2017), Sands Expo and Convention Centre, Singapore, May 29 - June 3, 2017
微分幾何法に基づくしわ構造の力学モデル
- Van Anh Ho and Shinichi Hirai,
Design and Analysis of a Soft-Fingered Hand with Contact Feedback,
IEEE Robotics and Automation Letters, Vol.2, Issue 2, pp.491-498, 10.1109/LRA.2016.2645120, Dec., 2016
- Van Ho and Shinichi Hirai,
Design and Analysis of a Soft-Fingered Hand with Contact Feedback,
2017 IEEE Int. Conf. on Robotics and Automation (ICRA 2017), Sands Expo and Convention Centre, Singapore, May 29 - June 3, 2017