Heads: Shinichi Hirai
Contact: Tatsuhiko Tsuboi
Date: 1999 - 2004
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
FPGA-based Realtime Vision
Heads: Shinichi Hirai Date: 1999 - 2004
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
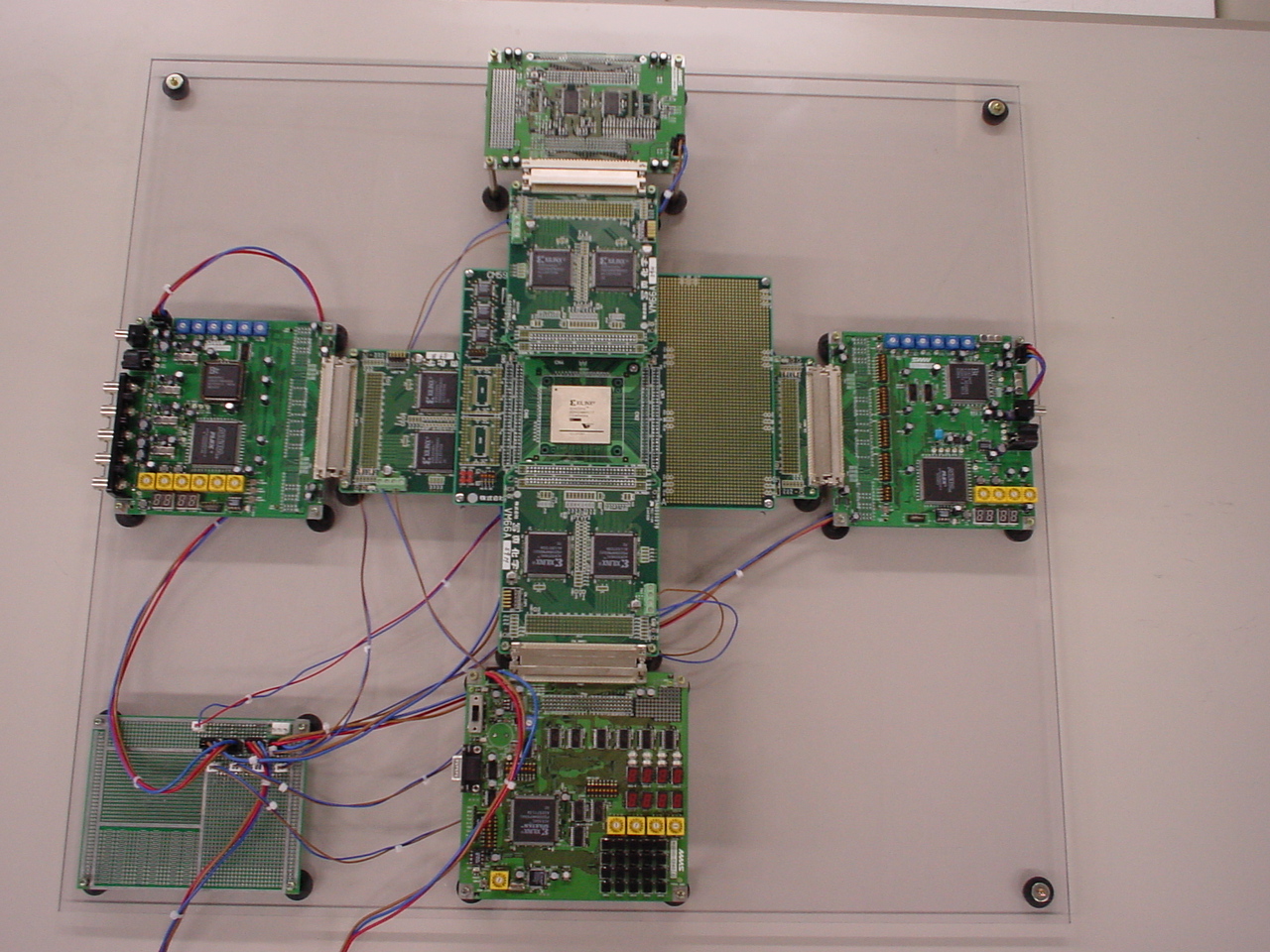
We will develop realtime vision chips attachable to a robotic hand. Vision algorithms to detect the position and the orientation of a planar motion object are implemented on FPGA's to perform them within the video-frame rate.
Image matching is one of fundamental operations in many fields such as seal and signature identifications in bank operation, fingertip identification in security, and precise positioning and inspection in LPD/PPD manufacturing. In the past decades, many image matching algorithms are proposed including normalized correlation method, matched filtering, phase-only correlation method, Hough-Fourier transform method, and generalized Hough transform method. These algorithms require much computation time since the algorithms consist of 2D operations such as 2D FFT/IFFT, polar transform, and Hough transform. Thus, it is difficult to perform image matching in the video-frame rate using these algorithms. One approach to the realtime image matching is the development of ASIC's specialized to an image matching algorithm. Normalized correlation method deals with 2D translational motion alone while the other algorithms detect the translational and rotational motion on an image plane. Namely, the normalized correlation method is much simpler than the others. In addition, computation in normalized correlation method is general-purpose, which is applied to image compression, resulting that the computation has been implemented on ASIC's. Unfortunately, the other algorithms to detect the planar motion has not been implemented on ASIC's because of the complexity of the algorithms, which increases the cost in their implementation to ASIC's.
In recent years, FPGA's (Field Programmable Gate Arrays) are in market. FPGA's are special LSI's in which users can implement logic circuits. Users design logic circuits on a computer using a hardware description language. The designed circuit is implemented on an FPGA to be driven as a hard-wired logic circuit. Since no physical fabrication processes in ASIC development are needed in this FPGA approach, the cost in the implementation of a vision algorithm decreases. In addition, we can realize parallel and pipelined processing in an FPGA, implying that we can reduce the computation time to perform a vision algorithm with high parallelism. Fortunately, matched filtering, phase-only correlation method, Hough-Fourier transform method, and generalized Hough transform method have high parallelism. Thus, in this project, we implement these vision algorithms on FPGA's to realize a realtime vision system with high cost-performance.
![[FPGA]](https://www.hirailab.com/pub-images/FPGAvision/FPGAboardCaption.jpg)
|
| FPGA-based realtime vision system |
![[01]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/1.GIF) |
![[02]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/2.GIF) |
![[03]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/3.GIF) |
![[04]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/4.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/5.GIF) |
![[06]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/6.GIF) |
![[07]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/7.GIF) |
![[08]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/8.GIF) |
![[09]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/9.GIF) |
| Computation of image gravity center by FPGA-based vision system |
![[01]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/01.GIF) |
![[02]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/02.GIF) |
![[03]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/03.GIF) |
![[04]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/04.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/05.GIF) |
![[06]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/06.GIF) |
![[07]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/07.GIF) |
![[08]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/08.GIF) |
![[09]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/09.GIF) |
![[07]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/10.GIF) |
![[08]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/11.GIF) |
![[09]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/12.GIF) |
| Detection of position and orientation by FPGA-based vision system |
![[01]](https://www.hirailab.com/pub-images/FPGAvision/robust/reference.GIF) |
![[02]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-000.GIF) |
![[03]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-020.GIF) |
| reference image | input image | occlusion |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-030.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-080.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-090.GIF) |
| deformation | illumination change | halation |
| Robust and realtime image matching by FPGA vision system |
| Personnel |
| Name | Title | Degree | |
| Tetsuya Yamamoto | Graduated | Master of Eng. | |
| Hiroyuki Morihara | Graduated | Master of Eng. | |
| Kohsuke Yamamoto | Graduated | Master of Eng. | |
| Hiroaki Yosioka | Graduated | Master of Eng. | |
| Masakazu Zakouji | Graduated | Master of Eng. | |
| Akihiro Masubuchi | Graduated | Master of Eng. | |
| Tatsuhiko Tsuboi | Graduated | Ph.D |
| Publications |
| Notes |
| Related Sites |