 |
FPGAベースビジョン
Heads: 平井 慎一
Contact: 坪井 辰彦
Date: 1999 - 2004
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
Jump to:
研究内容 |
担当 |
研究発表 |
参考資料 |
関連サイト
本プロジェクトの目的は,FPGA上にビジョンアルゴリズムを実装し,リアルタイム性,フレキシビリティ,コストパフォーマンスが高いビジョンシステムを実現することである.マッチトフィルタ法,位相限定相関法,ハフフーリエ変換法等をFPGA上に実装し,リアルタイム性とロバスト性の高い画像照合システムを構築する.
本プロジェクトでは,FPGA (Field Programmable Gate Array)上にビジョンアルゴリズムを実装し,CPUより高速で,ASICよりフレキシビリティとコストパフォーマンスが高いビジョンシステムを実現する.一般に,ソフトウェアによるビジョンアルゴリズムの実現は,高いフレキシビリティを持つがリアルタイム性に劣り,ASICによる手法はリアルタイム性に優れるがフレキシビリティとコストパフォーマンスに劣る.フレキシビリティとリアルタイム性とのこのようなジレンマを解決するために,FPGA上にビジョンアルゴリズムを実装する.
画像照合は,印鑑照合やサイン照合などのセキュリティ,指紋照合や虹彩照合などのバイオメトリクス,製品検査や物体ハンドリングなどのマニュファクチャリングを始めとして,様々な分野で基礎となる操作である.画像照合に関しては,正規化相関関数法,マッチトフィルタ法,位相限定相関法,ハフフーリエ変換法,一般化ハフ変換法など,従来より多くのアルゴリズムが提案されてきた.正規化相関関数法は,並進移動のみを対象とし,並進移動と回転移動を扱う他の手法と比較すると,比較的処理が単純である.また,正規化相関関数における演算は,画像圧縮などでも用いられるため,汎用性が高い.このような理由から,正規化相関法に関しては,いち早くVLSI化が行われたが,並進移動と回転移動を検出できる他の手法に関しては,VLSI化の試みが遅れている.そこで本プロジェクトでは,マッチトフィルタ法,位相限定相関法,ハフフーリエ変換法,一般化ハフ変換法等を,FPGA上に実装し,リアルタイム性とロバスト性の双方を満たす画像照合システムを構築する.
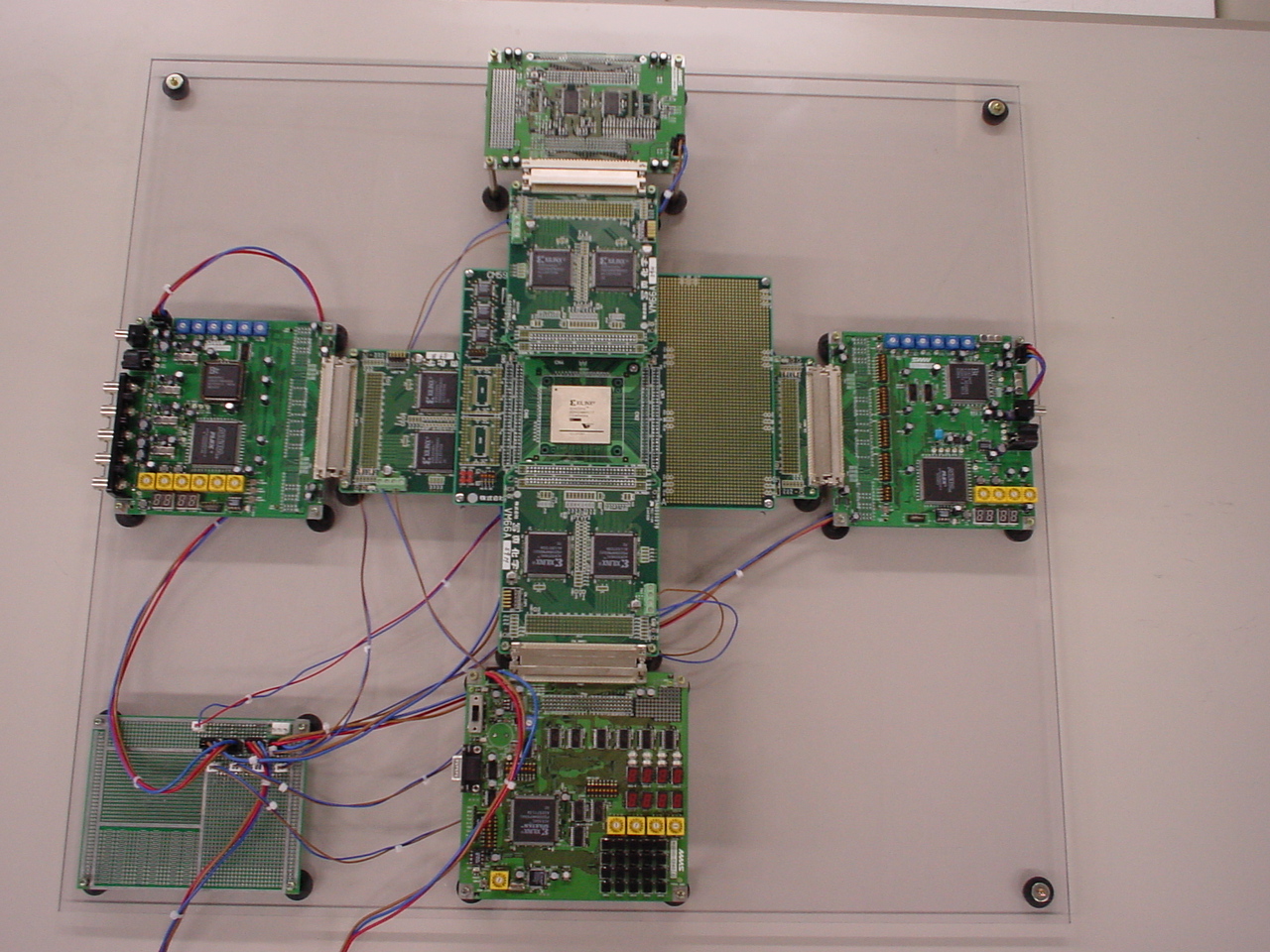
![[FPGA]](https://www.hirailab.com/pub-images/FPGAvision/FPGAboardCaption.jpg) |
| FPGAベースリアルタイムビジョン |
![[01]](https://www.hirailab.com/pub-images/FPGAvision/robust/reference.GIF) |
![[02]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-000.GIF) |
![[03]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-020.GIF) |
| reference image |
input image |
occlusion |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-030.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-080.GIF) |
![[05]](https://www.hirailab.com/pub-images/FPGAvision/robust/ROBUST-090.GIF) |
| deformation |
illumination change |
halation |
|
FPGAビジョンによるロバストなリアルタイム画像照合 |
論文
- Tatsuhiko Tsuboi and Shinichi Hirai,
Detection of planar motion objects using Radon transform and one-dimensional phase-only matched filtering,
Systems and Computers in Japan, Vol.37, No.5, pp.56-66, 10.1002/scj.20398, May, 2006
- Shinichi Hirai, Masakazu Zakoji, Akihiro Masubuchi, and Tatsuhiko Tsuboi,
Realtime FPGA-Based Vision System,
Journal of Robotics and Mechatronics, Vol.17, No.4, Special Issue on VLSI Computing for Real-World Intelligent Systems, pp.401-409, 10.20965/jrm.2005.p0401, Aug., 2005
- 坪井 辰彦, 平井 慎一,
片側ラドン変換を用いた平面運動検出,
日本ロボット学会誌, Vol.22, No.2, pp.207-214, 10.7210/jrsj.22.207, Mar., 2004
- 坪井 辰彦, 平井 慎一,
ラドン変換と一次元位相限定相関を用いた複数物体の平面運動検出,
電子情報通信学会論文誌, J87-D2, No.10, pp.1963-1972, Oct., 2004
- 平井 慎一, 座光寺 正和, 増渕 章洋, 坪井 辰彦,
FPGAベースリアルタイムビジョン,
日本ロボット学会誌, Vol.22, No.7, pp.873-880, 10.7210/jrsj.22.873, Oct., 2004
国際会議
- Shinya Yamamoto and Shinich Hirai,
Robust and Video-frame Rate Tracking of Planar Motion by Matched Filtering on FPGA,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.5, pp.4707-4712, 10.1109/ROBOT.2004.1302460, New Orleans, LA, U.S.A., Apr. 26 - May 1, 2004
- Shinichi Hirai, Masakazu Zakouji, Tatsuhiko Tsuboi,
Implementing Image Processing Algorithms on FPGA-based Realtime Vision System,
Proc. 11th Synthesis and System Integration of Mixed Information Technologies (SASIMI 2003), pp.378-385, Hiroshima, Japan, Apr. 3-4, 2003
- Tatsuhiko Tsuboi, Masakazu Zakouji, Akihiro Masubuchi, and Shinichi Hirai,
Parallel Processing of One-sided Radon Transform for the Realtime Detection of Position and Orientation of Planar Motion Objects,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.3, pp.2925-2930, 10.1109/ROBOT.2002.1013676, Washington D.C., U.S.A., May 11-15, 2002
- Shinichi Hirai, Tatsuhiko Tsuboi, Masakazu Zakouji, and Mizuho Shibata,
Handling of Randomly Located Moving Parts using FPGA-based Realtime Vision,
Proc. 7th Int. Conf. on Control, Automation, Robotics and Vision, Vol.3, pp.1150-1155, 10.1109/ICARCV.2002.1234935, Singapore, Dec. 2-5, 2002
- Tatsuhiko Tsuboi, Akihiro Masubuchi, Shinichi Hirai, Shinya Yamamoto, Kazuhiko Ohnishi, and Suguru Arimoto,
Video-frame Rate Detection of Position and Orientation of Planar Motion Objects using One-sided Radon Transform,
Proc. IEEE Int.Conf. on Robotics and Automation, Vol.2, pp.1233-1238, 10.1109/ROBOT.2001.932779, Seoul, Korea, May 21-26, 2001
解説
- 平井 慎一, 山本 真也,
コンピュータ・ビジョン・システムの設計,
Design Wave Magazine, Vol.2, pp.46-57, 2003
- 平井 慎一,
知能ロボットとシステムLSI,
計測と制御, Vol.40, No.12, pp.857-864, 2001
口頭発表
- 清水 一弘, 平井 慎一,
Matched Filter法を用いた高速ビジョンシステム,
計測自動制御学会システムインテグレーション部門学術講演会, pp.401-402, 2005
- 山本 紘督, 森原 浩之, 平井 慎一,
Matched Filterを基にしたビジョンアルゴリズムのFPGA実装,
第22回日本ロボット学会学術講演会予稿集CD-ROM, 2004
- 森原 浩之, 山本 紘督, 平井 慎一,
回転不変位相限定相関法を基にしたビジョンアルゴリズムのFPGA実装,
計測自動制御学会システムインテグレーション部門学術講演会, pp.180-181, 2004
- 山本 哲也, 平井 慎一,
FPGA実装のためのGVF Snakesの並列化,
計測自動制御学会システムインテグレーション部門学術講演会, pp.182-183, 2004
- 平井 慎一, 座光寺 正和, 坪井 辰彦,
FPGAベースリアルタイムビジョン,
ロボティクスシンポジア予稿集, pp.99-105, 舘山寺温泉, Mar. 17-18, 2003
- 坪井 辰彦, 平井 慎一,
ラドン変換と一次元位相限定相関を用いた平面運動物体の位置と姿勢の検出アルゴリズム,
ロボティクス・メカトロニクス'03講演会予稿集CD-ROM, 函館, May 23-25, 2003
- 山本 紘督, 座光寺 正和, 平井 慎一,
マッチトフィルタを基にしたビジョンシステムの構築,
ロボティクス・メカトロニクス'03講演会予稿集CD-ROM, 函館, May 23-25, 2003
- 森原 浩之, 座光寺 正和, 平井 慎一,
回転不変位相限定相関法を基にしたリアルタイムビジョンシステム,
ロボティクス・メカトロニクス'03講演会予稿集CD-ROM, 函館, May 23-25, 2003
- 山本 紘督, 森原 浩之, 平井 慎一,
マッチトフイルタを基にしたリアルタイムビジョンシステムの構築,
精密工学会 知能メカトロニクスワークショップ, pp.90-95, 草津, Aug. 21-22, 2003
- 山本 真也, 平井 慎一,
マッチトフィルタを基にしたビジョンアルゴリズムのFPGA実装,
情報処理学会DAシンポジウム, pp.221-224, 2003
- 山本 真也, 平井 慎一,
マッチトフィルタを基にした平面運動検出アルゴリズムのFPGA実装,
第21回日本ロボット学会学術講演会予稿集CD-ROM, 2003
- 坪井 辰彦, 平井 慎一,
ラドン変換と位相限定相関を用いたビジョンアルゴリズムのロバスト性評価,
計測自動制御学会システムインテグレーション部門学術講演会, pp.295-296, 2003
- 平井 慎一, 坪井 辰彦, 増渕 章洋, 座光寺 正和,
片側ラドン変換に基づく平面運動検出アルゴリズムの並列化,
ロボティクスシンポジア予稿集, pp.257-262, 別所温泉, Mar. 18-19, 2002
- 坪井 辰彦, 平井 慎一,
複数の座標中心上の片側ラドン変換を用いた位置・姿勢検出,
ロボティクス・メカトロニクス'02講演会予稿集CD-ROM, 松江, June 7-9, 2002
- 座光寺 正和, 増渕 章洋, 坪井 辰彦, 平井 慎一,
片側ラドン変換を基にしたビジョンアルゴリズムのFPGA 実装,
ロボティクス・メカトロニクス'02講演会予稿集CD-ROM, 松江, June 7-9, 2002
- 座光寺 正和, 平井 慎一,
FPGA実装による片側ラドン変換のリアルタイム計算,
第20回日本ロボット学会学術講演会予稿集CD-ROM, 2002
- 平井 慎一, 座光寺 正和, 坪井 辰彦,
片側ラドン変換ビジョンアルゴリズムのFPGA実装,
第45回自動制御連合講演会CD-ROM, 2002
- 坪井 辰彦, 平井 慎一,
ラドン変換とフーリエ位相限定相関法を用いた平面運動物体の位置・姿勢検出,
計測自動制御学会システムインテグレーション部門第3回学術講演会予稿集, Vol.2, pp.117-118, 神戸市産業振興センター, Dec. 19-21, 2002
- 坪井 辰彦, 平井 慎一,
片側ラドン変換を用いた平面運動物体の識別と位置・姿勢検出,
ロボティクス・メカトロニクス'01講演会予稿集CD-ROM, 高松, June 8-10, 2001
- 増渕 章洋, 平井 慎一,
ロボット搭載用ビジョンモジュールを用いた平面運動物体ハンドリング,
ロボティクス・メカトロニクス'01講演会予稿集CD-ROM, 高松, June 8-10, 2001
- 座光寺 正和, 平井 慎一,
リアルタイムビジョンのための片側ラドン変換法の並列化,
第19回日本ロボット学会学術講演論文集CD-ROM, 2001
- 坪井 辰彦, 平井 慎一,
片側ラドン変換を用いたビデオフレームレートでの平面運動計測とその実験的評価,
2001年電子情報通信学会情報・システムソサイエティ大会講演論文集, pp.225, 2001
- 平井 慎一, 坪井 辰彦, 増渕 章洋, 座光寺 正和,
ラドン変換に基づくビジョンアルゴリズムの並列化とFPGAへの実装,
電子通信情報学会技術研究報告 DSP2001-114, Vol.101, No.388, pp.31-38, Oct. 26, 2001
- 坪井 辰彦, 平井 慎一,
片側ラドン変換を用いたビデオフレームレートでの物体認識と平面運動計測,
第18回日本ロボット学会学術講演会予稿集, pp.645-646, 2000
- 増渕 章洋, 平井 慎一,
ロボット搭載用高速高機能ビジョンモジュールの研究,
第18回日本ロボット学会学術講演会予稿集, pp.645-646, 2000
![[01]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/1.GIF)
![[02]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/2.GIF)
![[03]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/3.GIF)
![[04]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/4.GIF)
![[05]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/5.GIF)
![[06]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/6.GIF)
![[07]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/7.GIF)
![[08]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/8.GIF)
![[09]](https://www.hirailab.com/pub-images/FPGAvision/bw_cog/9.GIF)
![[01]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/01.GIF)
![[02]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/02.GIF)
![[03]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/03.GIF)
![[04]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/04.GIF)
![[05]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/05.GIF)
![[06]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/06.GIF)
![[07]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/07.GIF)
![[08]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/08.GIF)
![[09]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/09.GIF)
![[07]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/10.GIF)
![[08]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/11.GIF)
![[09]](https://www.hirailab.com/pub-images/FPGAvision/DemoZakoujiREGTEC/12.GIF)