Heads: Takahiro Matsuno
Contact:
Date: 2021 -
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
Nanomaterials Research Institute, Dept. Materials and Chemistry, AIST
|
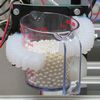
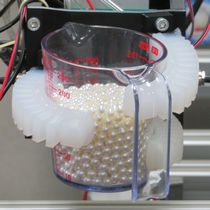
IPMC Sensors in Soft Hands
Heads: Takahiro Matsuno Date: 2021 -
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
We apply IPMC sensors developed by AIST to soft hands to estimate physical quantities of grasped objects.
| 2024/11/7 | Proposal for Adaptive and Seamless Technology transfer Program through targetdriven (A-STEP) R&D was accepted Development of Flexible Sensors Capable of Determining Grasping Conditions in Soft Robot Hands with Their Control Models |
| 2022/12/6 | Detecting grasping, releasing, or object dropping during object manipulation using flexible sensors in soft robot hands |
| 2022/12/1 | Detecting grasping, releasing, or object dropping during object manipulation using flexible sensors in soft robot hands |
| Personnel |
| Name | Title | Degree | |
| Luo Ziyan | Graduated | Master of Eng. | |
| Takebayashi Ryunosuke | Graduated | ||
| Shinnosuke Kusanagi | Graduated |
| Publications |
| Notes |
|
| Related Sites |