Heads: 平井 慎一
Contact:
Date: 2021 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
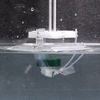
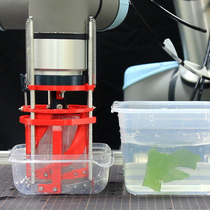
水中生物操作
Heads: 平井 慎一 Date: 2021 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
水中生物の操作に関する研究を進める.遊泳生物(ネクトン),浮遊生物(プランクトン),底生生物(ベンソス)に対して,環境との相互作用を利用して把持し,操作することを試みる.
![[aquatic organism manipulation]](https://www.hirailab.com/pub-images/aquaticorganismmanipulation/MVI_2622.png) |
| 担当 |
| 名前 | 学年 | 学位 | |
| 土川 祐輝 | M2 | ||
| 相澤 樹 | M1 | ||
| 山田 隼士 | M1 | ||
| 名手 一生 | Graduated | 工学修士 | |
| 杉本 愛斗 | Graduated | ||
| 田添 晃太郎 | Graduated |
| 研究発表 |
| 参考資料 |
|
|
| 関連サイト |