Heads: 平井 慎一
Contact: 岡田 育実
Date: 2013 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
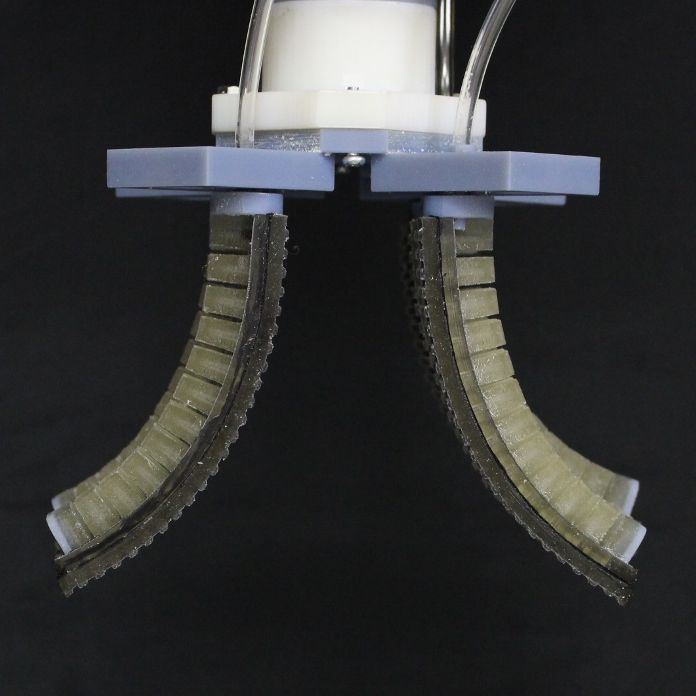
バインディングハンド
Heads: 平井 慎一 Date: 2013 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
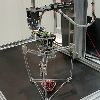
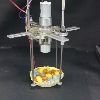
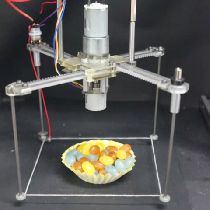
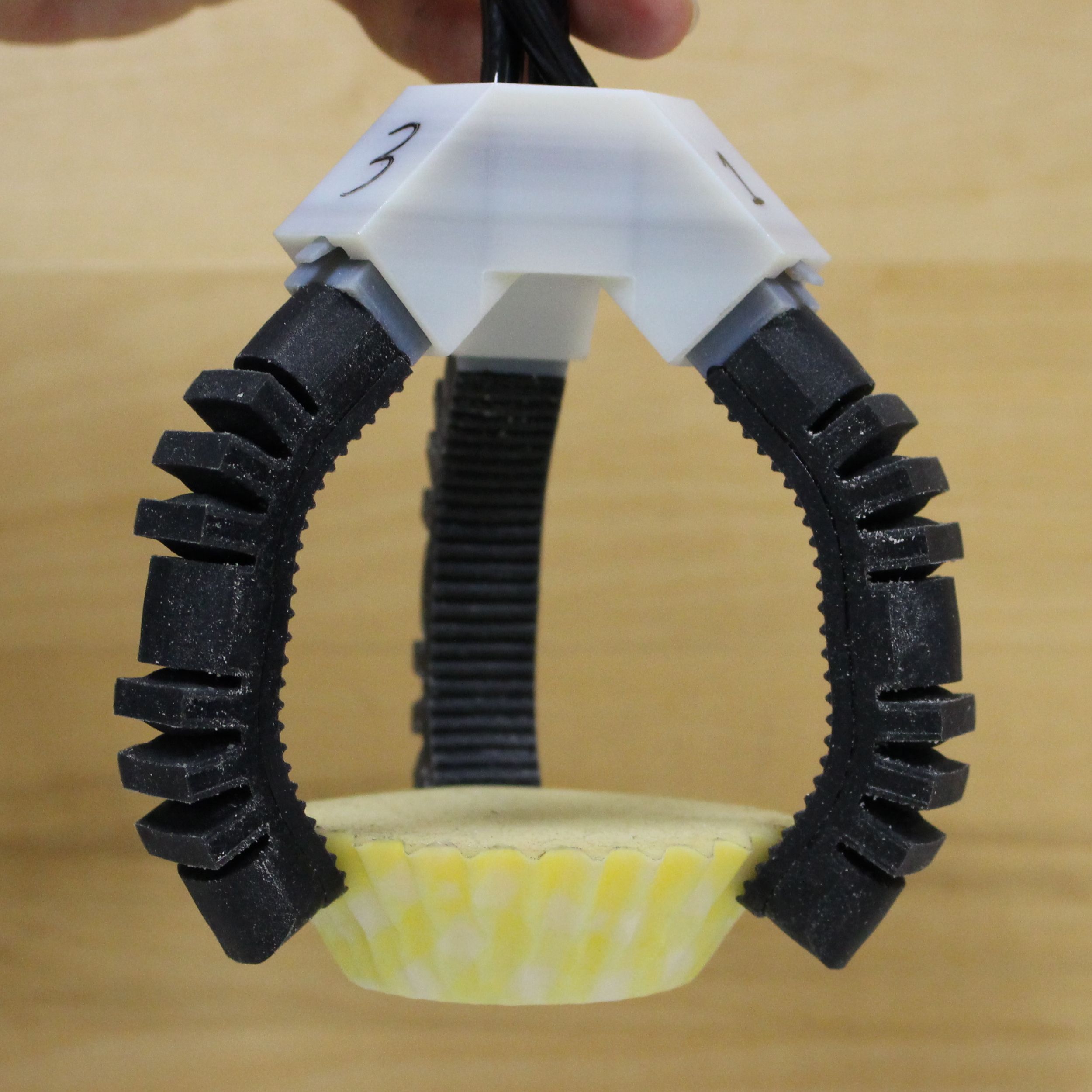
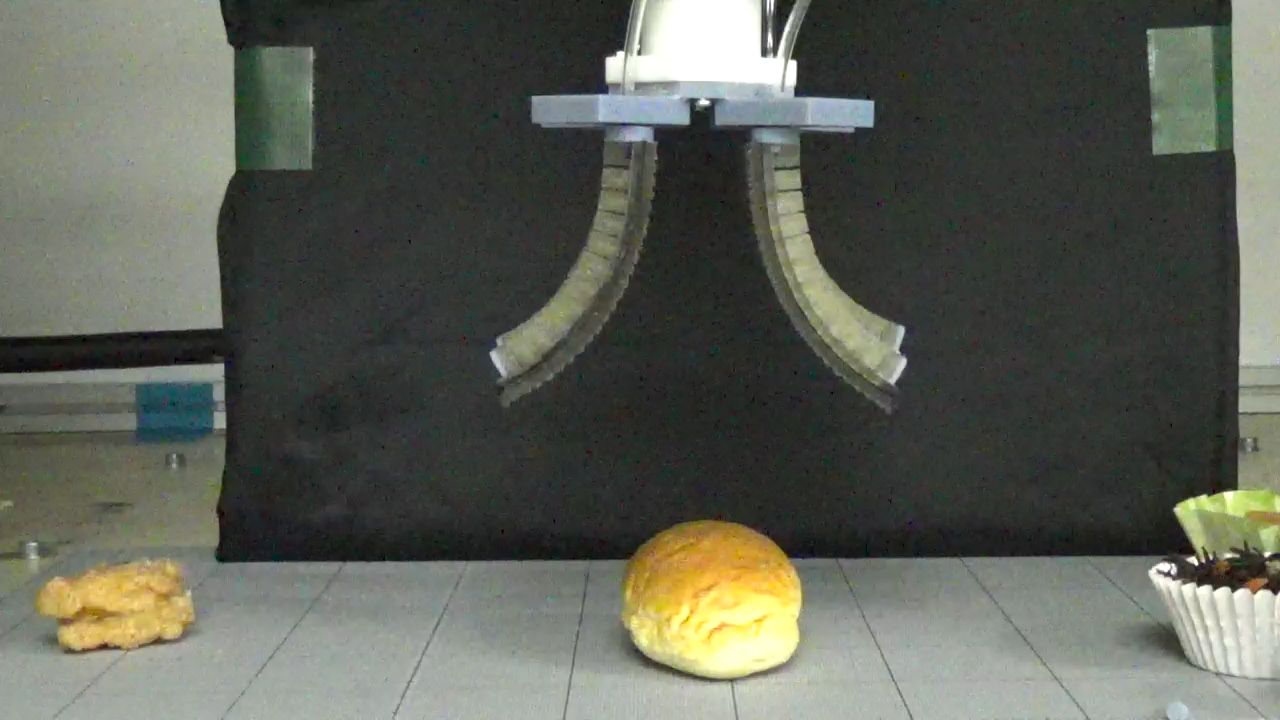
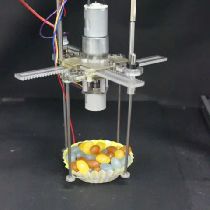
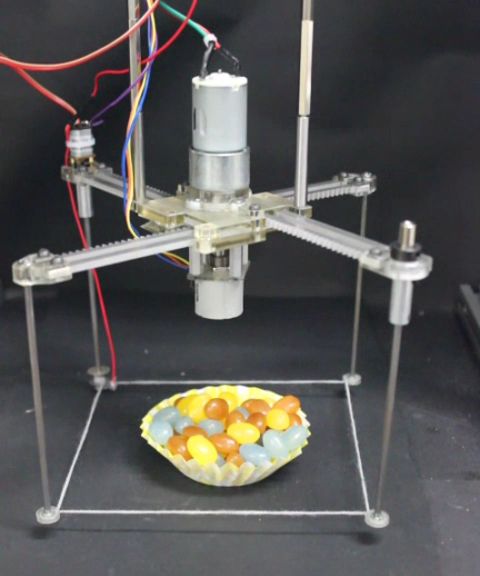
本研究では,バインディングという概念に基づいて,食品を把持しハンドリングするロボットハンドを提案する.バインディングにおいては,指の代わりに弾性糸により対象物を把持する.バインディングハンドは,変形しやすい食材入りのカップを把持し,箱にパッキングすることができる.
| 2019/7/11 | 国際食品工業展アカデミックプラザでAP賞(来場者評価部門)を受賞しました. |





|
|
| 2019/3/5 | 岡田君がバインディングハンドにおける把持力のモデリングでSI2018優秀講演賞を受賞しました. |
| 2019/3/1 | ニュースダイジェスト社「生産財マーケティング」の3月号の「今に花咲き身を結ぶRobotics(後編)」で,ソフトグリッパーが紹介されました. |
| 2019/2/1 | ニュースダイジェスト社「生産財マーケティング」の2月号の「今に花咲き身を結ぶRobotics(前編)」で,ソフトグリッパーが紹介されました. |
| 2018/10/3 | 私立大学研究ブランディング事業研究紹介 やわらかい材料でロボット研究を新たな境地へ |
| 2018/6/14 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. |





|
|
| 2018/6/12-6/15 | FOOMA 2018 アカデミックプラザで,プリンタブルハンド,プレストレッチ指ハンド,バインディングハンドを紹介.ROSベースロボットによるデモンストレーションを実施. |
|
|
| 2018/6/12 | 関塾タイムズ 7月号の研究最前線で「ソフトロボティクス」と題して紹介されました. |
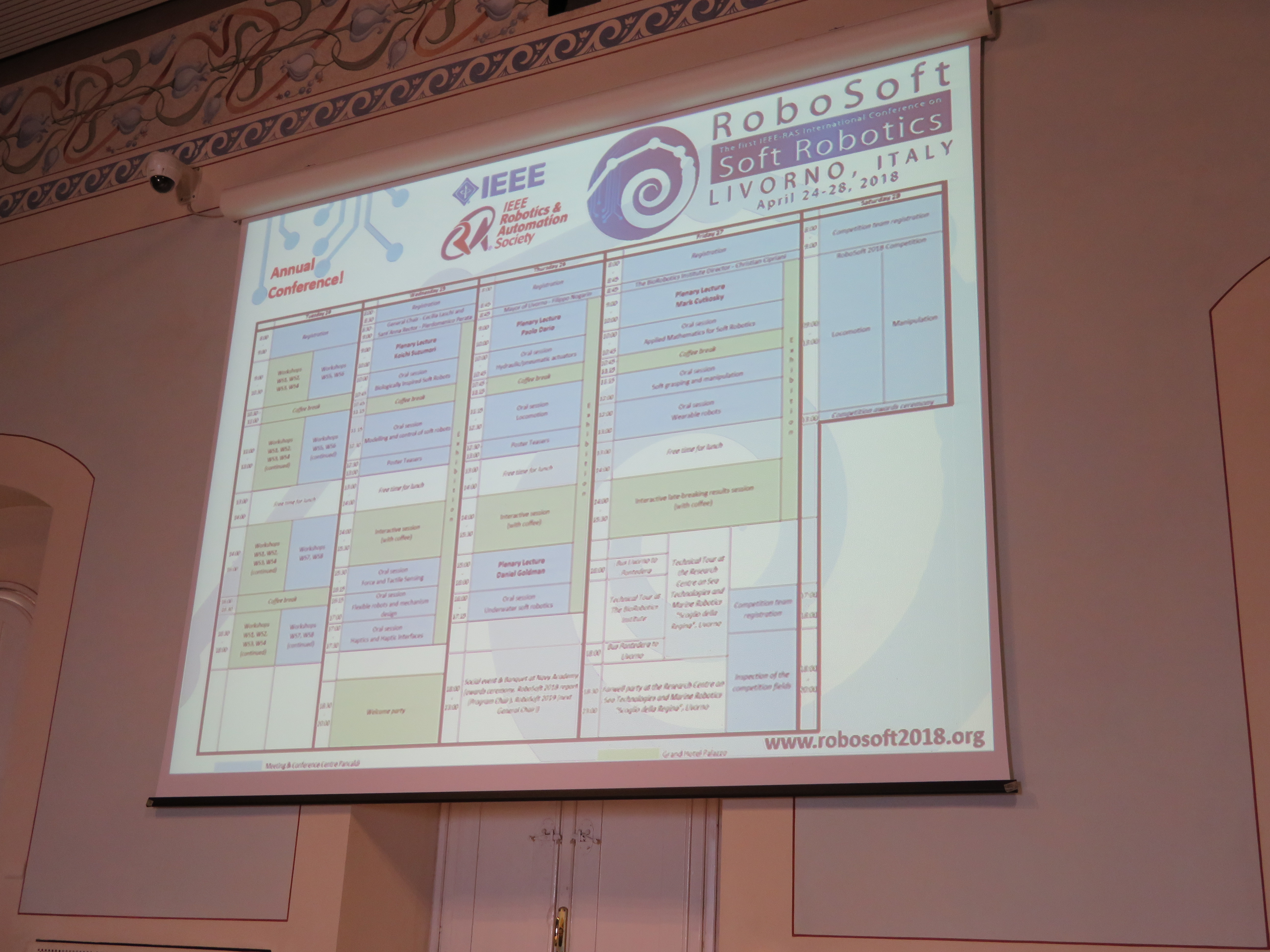
| 2018/4/24-4/28 | The First IEEE-RAS Int. Conf. on Soft Robotics (RoboSoft 2018) at Grand Hotel Palazzo, Livorno, Italy |




|
|
| 2017/12/8 | ソフトロボティクス研究専門委員会 (SIG SoRo Japan) 第3回研究会 |
| 2017/11/16 | 日本食品機械工業会 1Day 特別講演会で「食品材料ハンドリング用ソフトロボットハンド」と題して講演 |
| 2017/10/20 | 17th Int. Conf. on Control, Automation and Systems (ICCAS 2017) の,Special Session Soft Roboticsで Soft Robotics for Locomotion and Manipulation と題して招待講演 |
| 2017/6/15 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. (大学ウェブページ) |




|
|
| 2017/6/13-6/16 | 国際食品工業展アカデミックプラザで,食品材料ハンドリング用ソフトロボットハンドを展示 |
| 2017/4/30 | 朝日新聞「科学の扉 ロボット ソフトに進化」でソフトロボティクスに関する研究が紹介されました. |
| 2016/6/9 | 国際食品工業展アカデミックプラザでFOOMA AP(アカデミックプラザ)賞を受賞しました. |
| 2015/12/21 | 北海道立総合研究機構工業試験場で開催された水産機械研究会で「バインディングに基づく食品ハンドリング用軽量ロボットハンド」を発表 |
| 2015/12/2-5 | 国際ロボット展でバインディングハンドとマイクロ空気圧弁を展示 |

|
|
| 2015/11/27 | 東京キャンパスで開催されたプレスセミナーで「バインディングに基づく食品ハンドリング用軽量ロボットハンド」を発表 |
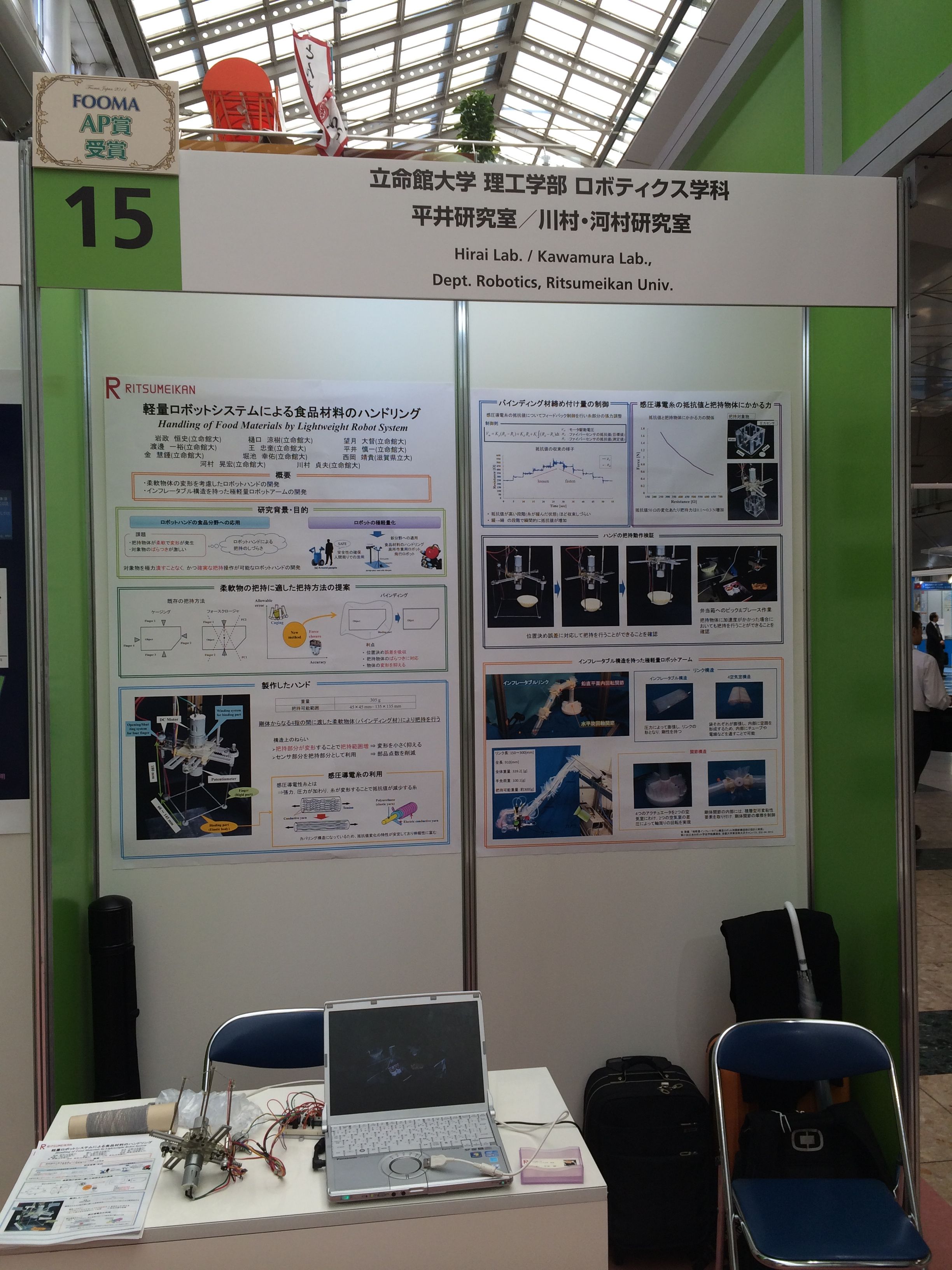
| 2014/6/12 | 国際食品工業展アカデミックプラザでFOOMA AP(アカデミックプラザ)賞を受賞しました.(pick up) |



|
|
| 2014/6/10-13 | FOOMA 2014アカデミックプラザで 「軽量ロボットシステムによる食品材料のハンドリング」を発表 |
|
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-bound.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-lift.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-liftup.jpg) |
| バインディングハンドによる摘み上げ | |||
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-1.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-2.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-3.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-4.jpg) |
| バインディングハンドによる位置補正 | |||
| 担当 |
| 名前 | 学年 | 学位 | |
| 河野 有哉 | Graduated | 工学修士 | |
| 岡田 育実 | Graduated | 工学修士 | |
| 山田 寛大 | Graduated | 工学修士 | |
| 岩政 恒史 | Graduated | 工学修士 | |
| 松本 悠汰 | Graduated |
| 研究発表 |
| 参考資料 |
|
|
|
| 関連サイト |