Heads: Shinichi Hirai
Contact: Shinichi Tokumoto
Date: 1997 - 2001
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
Rheological Object Forming
Heads: Shinichi Hirai Date: 1997 - 2001
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
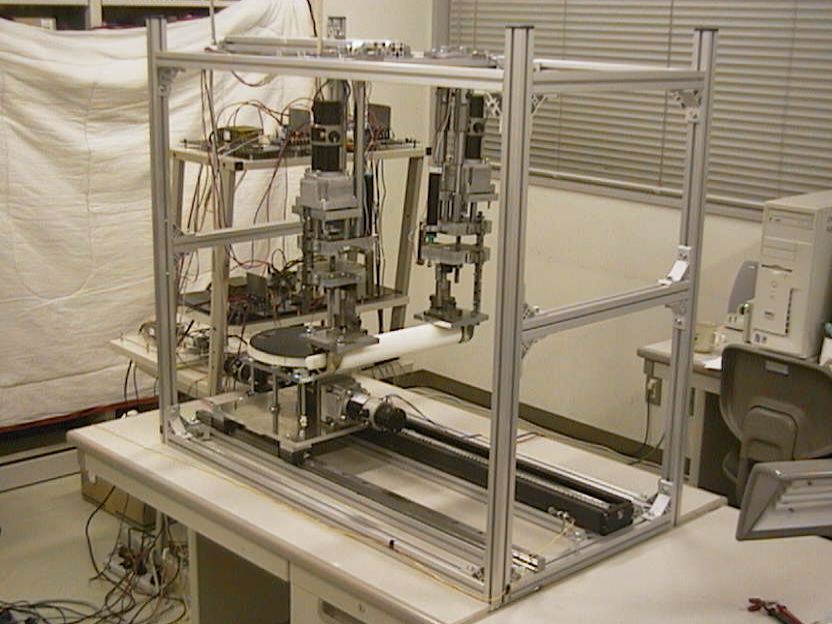
The goal of this project is to perform the automatic forming operations of rheological objects such as dough, paste, and jerry. Novel forming machine and forming control law using vision sensing are developed for the automatic forming of rheological objects.
| 2001/5/24 | Shinichi Tokumoto was nominated to Finalist of 2001 IEEE Int. Conf. Robotics and Automation Kayamori Best Paper Award by Vision-based Automatic Forming of Rheological Objects Using Deformation Transition Graphs. |
|
|
Forming operations of rheological objects such as dough, paste, and jerry strongly depend on humans in food industry. Automatic operations are required to keep the cleanness of the food products. Thus, we will develop an automatic forming machine of rheological objects.
We have developed a novel forming mechanism with multi degrees of freedom and have derive a forming control law using vision feedback. The developed forming system has the following features:
| → |  |
elastic object | |||
 |
→ |  |
→ |  |
rheological object |
| natural shape | deformed shape | → |  |
plastic object |
| Personnel |
| Name | Title | Degree | |
| Takuya Saito | Graduated | Master of Eng. | |
| Yoshiaki Fujita | Graduated | Master of Eng. |
| Publications |
| Notes |
|
|
|
|
| Related Sites |