Heads: 平井 慎一
Contact: 王 忠奎
Date: 2012 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
Multi-Scale Robotics Lab., IRIS, ETH, Switzerland
|
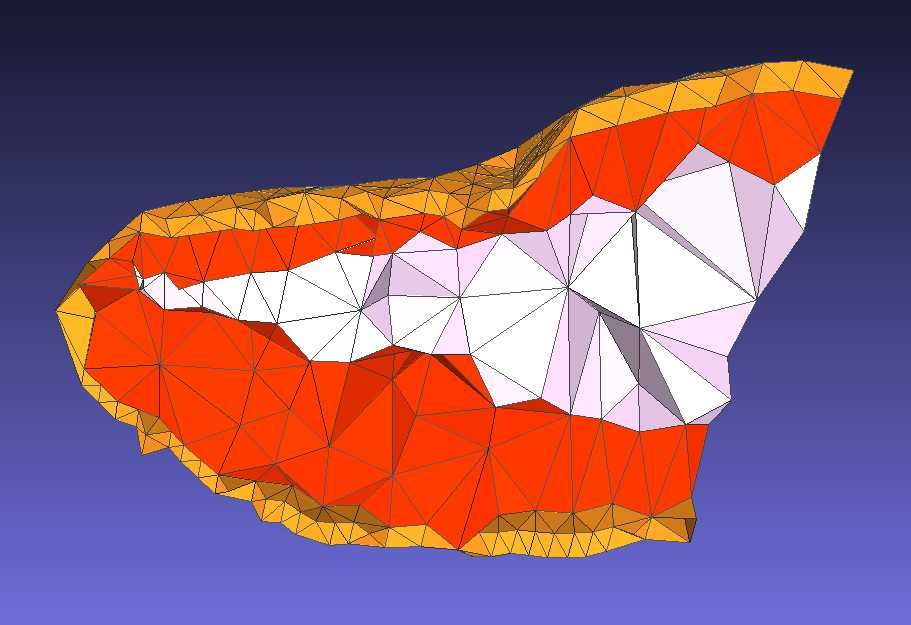
指の力学モデリング
Heads: 平井 慎一 Date: 2012 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究では,指の力学モデルを構築する.MRI撮像から指の組織を識別し,指の有限要素モデルを構築する.モデルのダイナミクス解析を通して,ヒトの触知覚を理解することを目指す.
| 担当 |
| 名前 | 学年 | 学位 | |
| Van Anh Ho | 北陸先端科学技術大学院大学 | 工学博士 | |
| 王 忠奎 | 立命館大学 | 工学博士 | |
| 浪間 一希 | Graduated | 工学修士 |
| 研究発表 |
| 参考資料 |
|
| 関連サイト |