Heads: Shinichi Hirai
Contact: Zhongkui Wang
Date: 2013 -
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
Ikoma Lab. (Kyoto Pref. Univ. of Medicine)
|
Mechanical Modeling of Foot
Heads: Shinichi Hirai Date: 2013 -
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
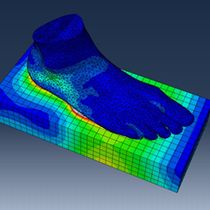
The aim of this research is mechanical modeling of flatfoolt. Based on images of foot, we build a finite element model of flatfoot and perform physical simulation of walking and surgery.
| 2015/5/21 | Dr. Wang won "favorite" poster award at SIMULIA Community Conference at Berlin. (photos) |

|
|
| Personnel |
| Name | Title | Degree | |
| Zhongkui Wang | Ritsumeikan University | Ph.D | |
| Shouta Yamae | Graduated | Master of Eng. | |
| Kousuke Kadoma | Graduated | Master of Eng. | |
| Kawada Yutaka | Graduated | ||
| Yuusaku Tani | Graduated | ||
| Ryousuke Taguchi | Graduated | ||
| Takaya Higuchi | Graduated |
| Publications |
| Notes |
| Related Sites |