Heads: 平井 慎一
Contact: 王 忠奎
Date: 2013 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
生駒研究室(京都府立医科大学)
|
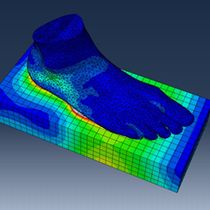
足の力学モデリング
Heads: 平井 慎一 Date: 2013 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究の目標は,偏平足の力学モデリングである.足内部の撮像結果から有限要素モデルを構築し,歩行と手術の力学シミュレーションを実現する.
| 2015/5/21 | 王助教がベルリンで開催されたSIMULIA Community Conferenceにおいて "favorite" poster awardを受賞しました. (photos) |

|
|
| 担当 |
| 名前 | 学年 | 学位 | |
| 王 忠奎 | 立命館大学 | 工学博士 | |
| 山江 翔太 | Graduated | 工学修士 | |
| 門馬 功祐 | Graduated | 工学修士 | |
| 河田 悠花 | Graduated | ||
| 谷 優作 | Graduated | ||
| 田口 遼将 | Graduated | ||
| 樋口 太也 | Graduated |
| 研究発表 |
| 参考資料 |
| 関連サイト |