Heads: Shinichi Hirai
Contact: Shinichi Hirai
Date: 1992 - 1995
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
Design and Learning of Force Control Laws
Heads: Shinichi Hirai Date: 1992 - 1995
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
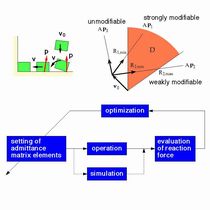
The goal of this project to establish a method to determine admittance control parameters appropriate to individual mating operations. We will develop an analytical method to design admittance matrices and commanded motion in mating operations based on the modifiability of the operations.
Manipulative operations such as part-mating and grasping must be achieved despite positioning errors of manipulated objects. Applying damping control, a manipulator has a capability of coping with the positioning errors by modifying its velocity according to the reaction forces acting on it. An admittance matrix, which characterizes the actual manipulator velocity, must be determined so that the operation can be performed successfully. It is, however, difficult for human operators to determine an admittance matrix adequately for a various kind of operations. The aim of this project is to develop an analytical method to design force control laws for part-mating operations. In addition, we will develop a learning control where force control parameters are updated through actual operations.
| Personnel |
| Name | Title | Degree |
| Publications |
| Notes |
| Related Sites |