Heads: 平井 慎一
Contact: 井上 貴浩
Date: 2001 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
科学研究費補助金 (No.20246049) 2008 - 2010 (平井 慎一)
人の巧みさに関する軟組織の力学の解明
Associated lab/group:
杉山研究室(マイクロ機械システム工学科)
|
柔軟指操作
Heads: 平井 慎一 Date: 2001 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
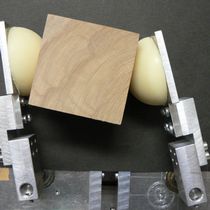
本研究の目的は,柔軟な指先を有するハンドにより,物体を安定かつ器用に操作することである.リアルタイムビジョンで物体の位置と姿勢を,タクタイルセンサで把持力を計測し,フィードバックすることで,物体の安定把持と物体操作を実現する.制御則の構築と柔軟指先のモデリングを進める.
![[00]](http://www.hirailab.com/pub-images/softfinger/a-150x113.jpg) |
![[00]](http://www.hirailab.com/pub-images/softfinger/P1000150-150x113.jpg) |
![[00]](http://www.hirailab.com/pub-images/softfinger/c-150x113.jpg) |
| 二自由度ハンドによる把持力制御 |
![[00]](http://www.hirailab.com/pub-images/softfinger/P1000156-150x113.jpg) |
![[00]](http://www.hirailab.com/pub-images/softfinger/P1000158-150x113.jpg) |
![[00]](http://www.hirailab.com/pub-images/softfinger/P1000157-150x113.jpg) |
| 二自由度ハンドによる姿勢制御 |
![[panel]](http://www.hirailab.com/pub-images/softfinger/PanelSoftFinger.jpg)
![[panel]](http://www.hirailab.com/pub-images/softfinger/PanelSoftFingerResearch.jpg)
| 担当 |
| 名前 | 学年 | 学位 | |
| Damith Suresh Chathuranga | モラトゥワ大学 | 博士(工学) | |
| 井上 貴浩 | 東京電機大学 准教授 | 工学博士 | |
| 三森 友貴 | D3 | ||
| 望月 大督 | Graduated | 工学修士 | |
| 石川 淳一 | Graduated | 工学修士 | |
| 中谷 康隆 | Graduated | 工学修士 | |
| 上本 宏明 | Graduated | 工学修士 | |
| 山﨑 雄二郎 | Graduated | 工学修士 | |
| 南谷 康雄 | Graduated | 工学修士 | |
| 藤井 郁夫 | Graduated | 工学修士 | |
| 岡田 健太 | Graduated | ||
| 北 晋也 | Graduated |
| 研究発表 |
| 参考資料 |
|
|
|
|
|
|||||
|
| 関連サイト |





