
soft robots
| Description |
We will elucidate the dynamics of contact between a soft body and a soft environment. When a soft robot moves in contact with the environment, a dynamic interaction occurs between the soft robot and the environment. This interaction, which will be referred to as soft contact, will be analyzed and formulated.
In jumping soft robots, the impulse generated between the robot and the environment determines the jumping height of the robot. This impulse depends on the deformed shape and material properties of the robot as well as the deformation and frictional properties of the environment. We will thus formulate the jumping of the soft robot to obtain the deformed shape and properties to realized a higher jumping.
|
|
|
|
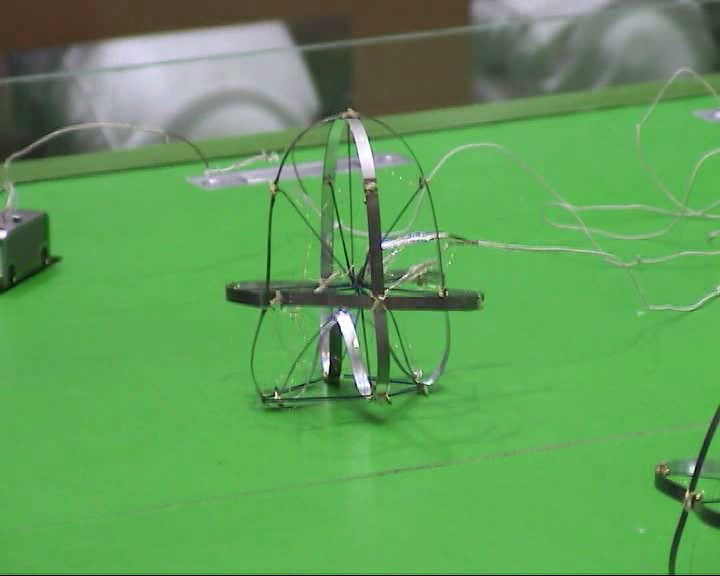
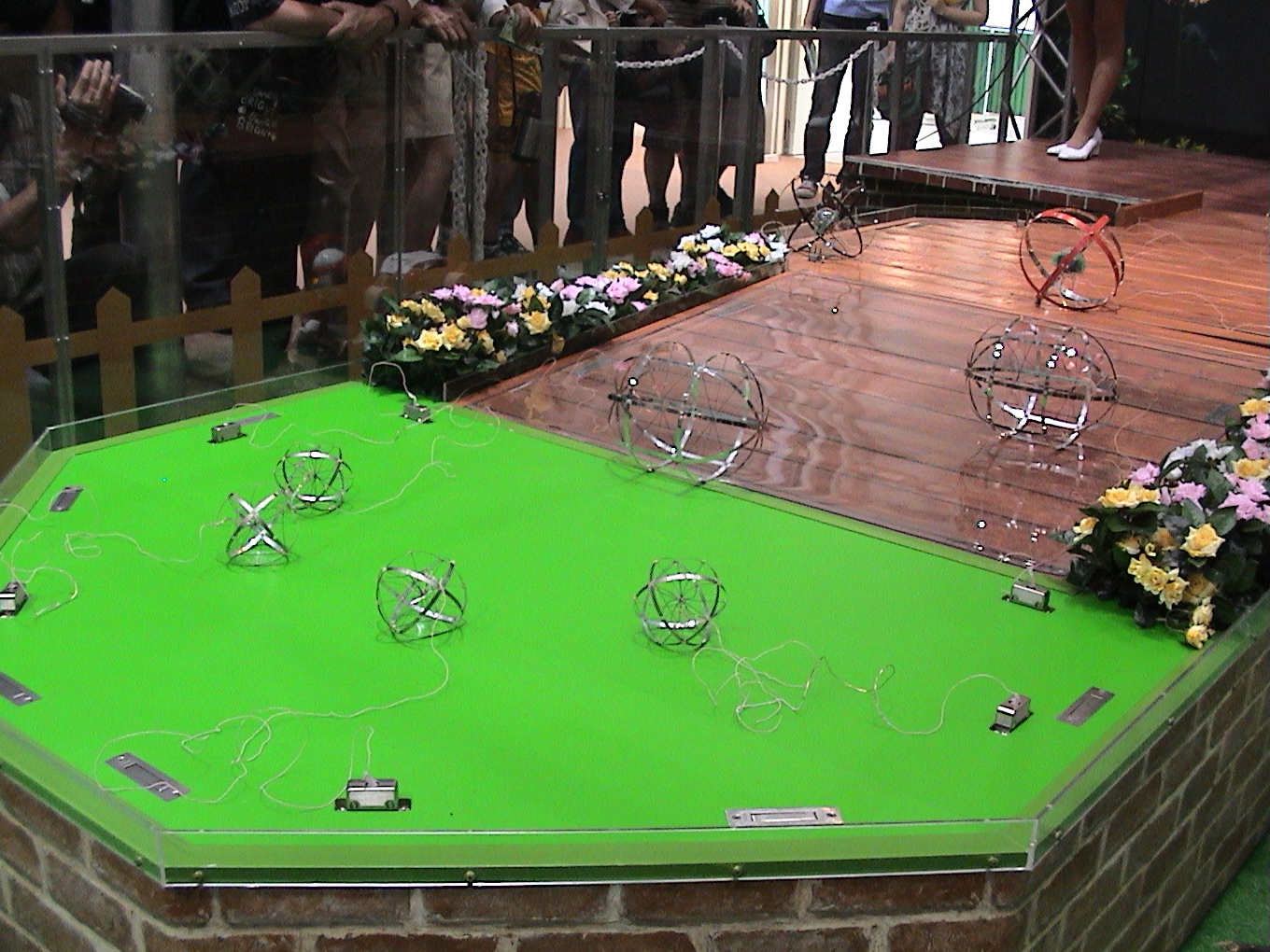
| mechanics of jumping | crawling and jumping soft robots |
soft interface | micro parts feeding |
| 2010/5/26 | Biomimetic Soft Morphing Workshop at Seoul National University |

|
|
| 2005/7/26-8/7 | Demonstration on Crawling and Jumping Soft Robot KOHARO at the Robot Station, Expo 2005 Aichi Japan. (HP) |
| 2005/6/9-19 | Demonstration on Crawling and Jumping Soft Robot KOHARO at Prototype Robot Exhibition, Expo 2005 Aichi Japan. (photo diary) (demonstration) |



|
|
| Budget |
| Notes |
| Related Sites |