 |
| competition area |
 |
 |
 |
 |
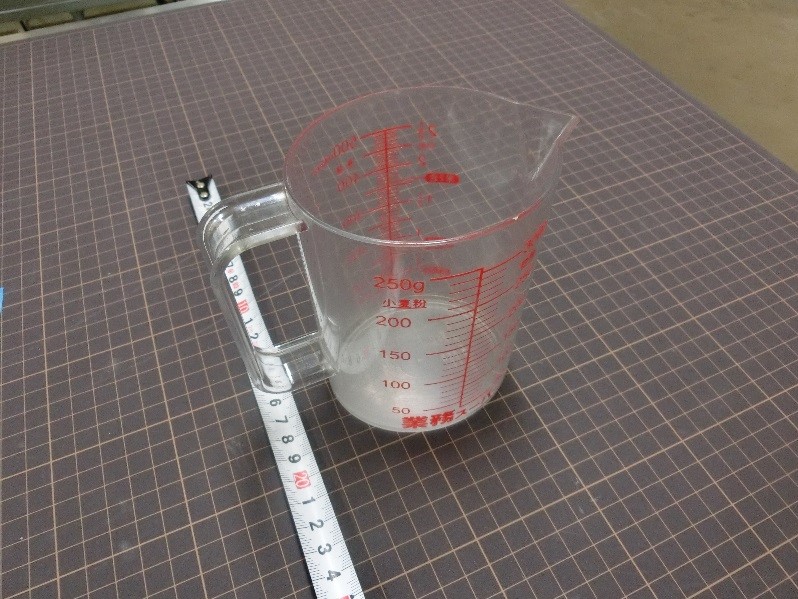
| cup 56g81 x 54 x H95 | pet bottle 23g59 x 59 x H220 | measuring cup g79 x 90 x H110 | wine bottle 50gD68 x H280 |
| four containers | |||
 |
| goal glass(90 x 67 x H70) |
| Competition overview |
Each team will drive a UR robot manipulator to pour beads (substitutes for wine) into a glass fixed on the table. Beads are contained in multiple containers, such as plastic bottles and cups.
| Competition rules |
|
| competition area |
|
|
|
|
| cup 56g81 x 54 x H95 | pet bottle 23g59 x 59 x H220 | measuring cup g79 x 90 x H110 | wine bottle 50gD68 x H280 |
| four containers | |||
|
| goal glass(90 x 67 x H70) |
| Competition flow |
| Notes |
| Schedule |
| 2021/??/?? | lecture on UR robot (handout) |
| 2022/2/22 | introducing robot contest |