ワイン注ぎロボットコンテスト
URのロボットマニピュレータを用いて,テーブル上に固定したグラスに,飲料に見立てたビーズを注ぐ.飲料(ビーズ)は,ペットボトル,ビン形状のボトルなど,複数の容器に入っている.
- チーム
- 1人以上3人以下でチームを構成する.1チームの予算を3万円以内とする.
- URマニピュレータ
- 一台のURマニピュレータを全チーム共通で用いる.マニピュレータの使用方法について講習を行う.
- グリッパ
- マニピュレータの先端に取り付けるグリッパを各チームで製作する.グリッパのサイズはスタート時にW200×D200×H200に収まるサイズとする.グリッパの駆動方法は問わない.グリッパの開閉動作に限り,手動での操縦が認められる.また,グリッパの動作にURマニピュレータのIOポートを使用することも認められる.各チームが使用可能なポートは後日割り当てる.
- グリッパのマニピュレータへの取り付け
- 試作したグリッパーをURマニピュレータに取り付けるために,URロボットマニピュレータの手先インターフェースのCAD図を用いる.
- 競技エリア
- 競技エリアはスタートエリア,ゴールグラス,ストックエリアで構成される.また,ゴールグラスの下には測りとトレイが設置されている.スタートエリアはURマニピュレータに対して右側,ゴールグラスは左側に位置する.
 |
| 競技エリア |
- 容器
- ストックエリアは4つの容器が置かれている.各容器にはあらかじめ100gのビーズ(直径6mm穴なし)が入っている.このビーズをすべてゴールグラスに注ぐことを目標とする.
 |
 |
 |
 |
| コップ 56g81×54×H95 |
ペットボトル 23g59×59×H220 |
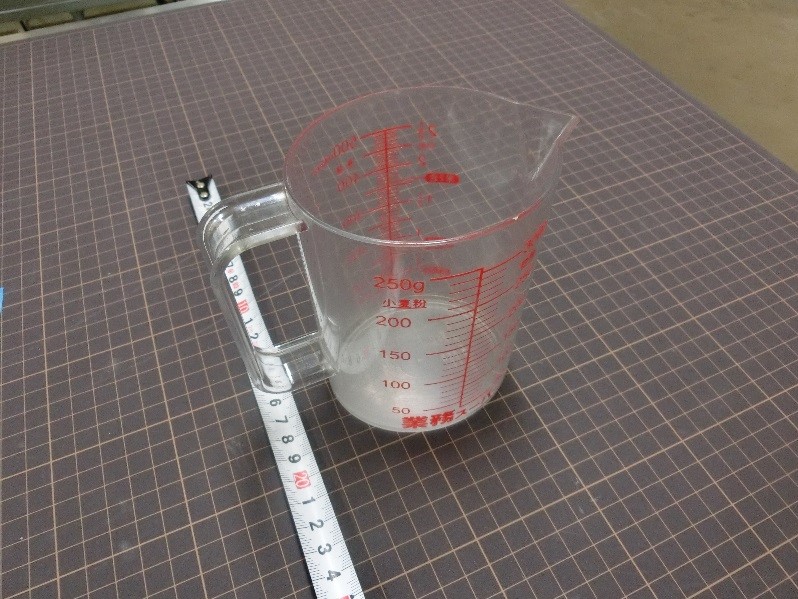
計量カップ g短軸79×長軸90×H110 |
ワインボトル 50g直径68×H280 |
| 4つの容器 |
 |
| ゴールグラス(90×67×H70) |
- 競技者は製作したグリッパをURマニピュレータに取り付け,プログラムをロードする.その後,URマニピュレータを既定の初期姿勢に移動させる.
- 競技開始の合図で,容器の中から一つ選択し,その容器をスタートエリアに置く.この操作は競技者が行う.
- 容器を置く手順が終了し次第,審判に宣言し,URマニピュレータのプログラムを再生する.ロボットで容器を把持し,容器内の全てのビーズをゴールグラスに注ぐ.この間に,グリッパの開閉動作のみ手動での操縦が認められる.
- ビーズを注いだ後に,容器をスタートエリアに戻す.容器はスタートエリアに接地し,かつ,転倒していない状態で戻す必要がある.
- 容器を戻す手順が終了し次第,審判に宣言する.ここで,ゴールグラスに注がれたビーズの重量が記録される.記録した後に,ゴールグラスのビーズは取り除かれる.
- 競技に使用した容器をストックエリアに戻す.続いて残りの容器の中から一つ選択し,スタートエリアに置く.この操作は競技者が行う.
- 新たに置いた容器を用いて,注ぎ動作を同様に行う.この工程を4つの容器すべてに対して終えたとき競技終了とする.または,競技者の任意のタイミングで競技終了とする.点数の計算と作業時間を記録する.
- 上記を1セットとし,各チームは3セット行う.3セット行った後に,最も良かった得点をそのチームの点数とする.
| 2022/??/?? |
URロボット講習会 (資料) |
| 2022/2/22 |
ロボットコンテストの紹介 |