I will teach basics and applications of analytical mechanics
emphasizing variation principle of statics, variation principle of
dynamics, and method of variation. These issues will be applied to
mechanics of rigid body systems and vibration, which are important
topics in mechatoronics.
|
1st | 9/27 | Introduction: Newton mechanics vs analytical mechanics |
| 2nd | 10/4 | Variational Principles: variational principle in statics, variational principle in dynamics |
| 3rd | 10/18 | Variational Principles: principle of virtual works, Hamilton's principle |
| 4th | 10/20 | Variational Principles: numerical method for ODEs, constraint stabilization method (CSM) |
| 5th | 10/25 | Motion of Mass: Lagrange equation of motion, cylindrical and spherical coordinate systems |
| 6th | 11/1 | Link Mechanisms: planar open link mechanism, planar closed link mechanism |
| 7th | 11/8 | Rigid Body Rotation: planar rotation, object coordinate system, inertia of moment |
| 8th | 11/15 | Rigid Body Rotation: spatial rotation, rotation matrix, angular velocity vector, quaternions |
| 9th | 11/22 | Rigid Body Rotation: equation of rotation, forced rotation |
| 10th | 11/29 | Elastic Deformation: elastic potential energy, finite element method (FEM) |
| 11th | 12/6 | Elastic Deformation: kinetic energy, dynamic equation of deformation |
| 12th | 12/13 | Elastic Deformatino: 2D/3D elastic deformation |
| 13th | 12/20 | Elastic Deformatino: Green strain |
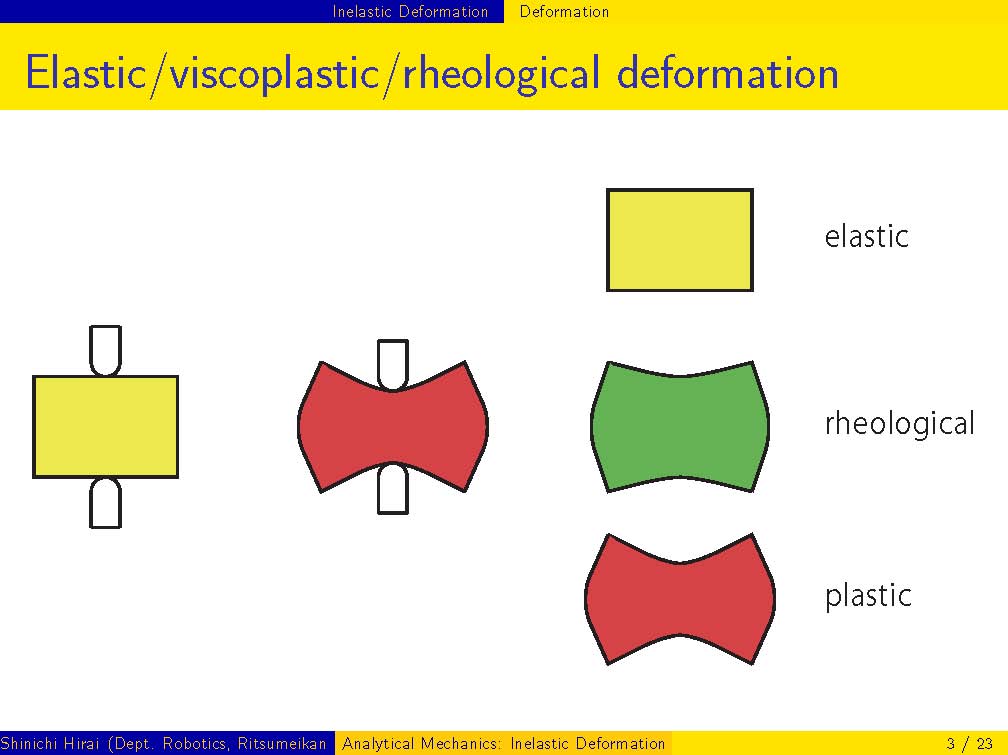
| 14th | 1/10 | Inelastic Deformation: 1D inelastic deformation |
| 15th | 1/17 | Inelastic Deformation: 2D/3D inelastic deformation |
You are requested to study Newton mechanics (classical mechanics). In addition, you should complete differential and integral calculus.