I will lecture principles of computational and mechanical intelligence. Principles in computational intelligence include Turing machine and search. Principles in mechanical intelligence cover object manipulation and computer vision. (Dept. Robotics, B2)
|
1st | 9/27 | Robot Intelligence: Computation, Mechanics, Intelligence |
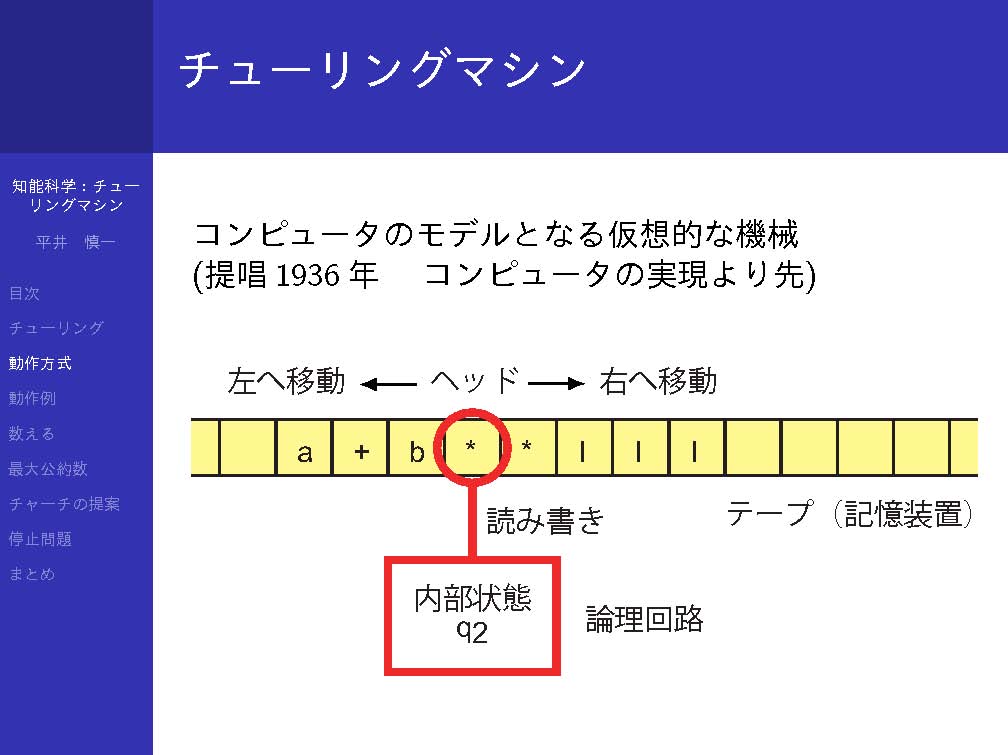
| 2nd | 10/4 | Turing machine: state, symbols, transition |
| 3rd | 10/18 | Turing machine: diagonal argument, halt problem |
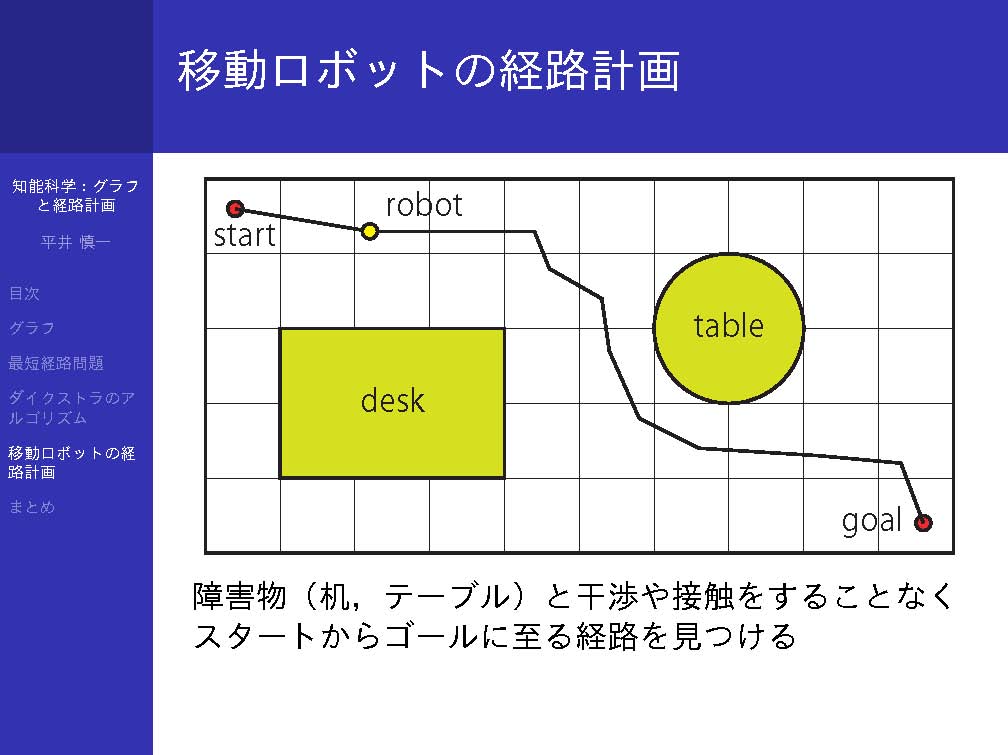
| 4th | 10/20 | Search: graphs, shortest path, Dijkstra method |
| 5th | 10/25 | Search: robot motion planning, probabilistic roadmaps |
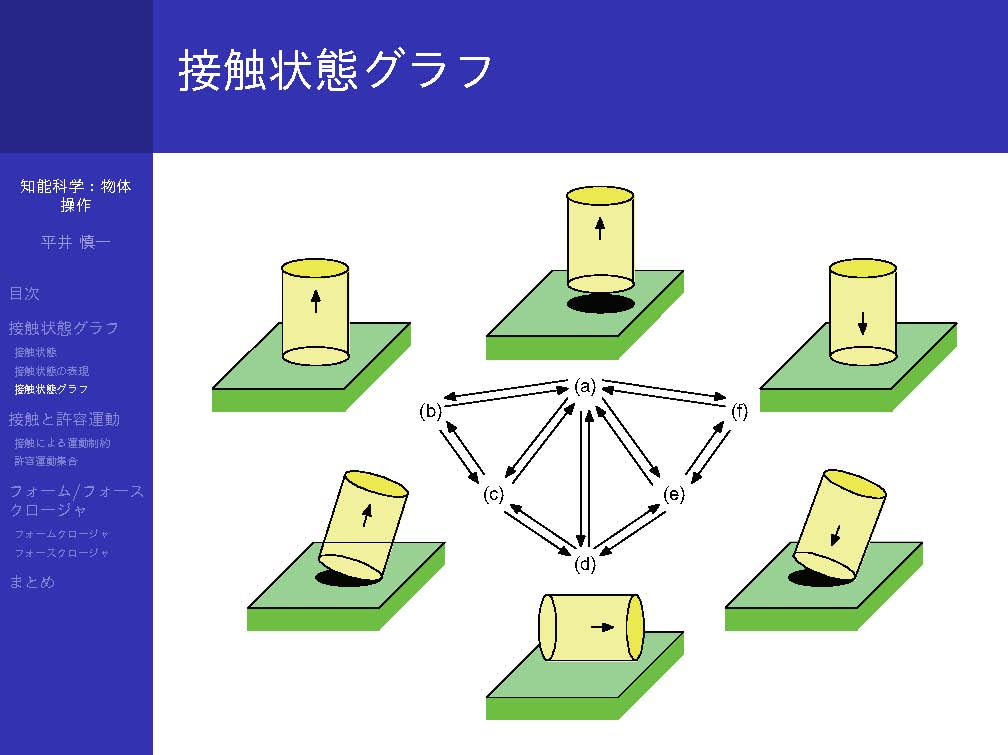
| 6th | 11/1 | Object manipulation: contact states, contact state graph (1st quiz) |
| 7th | 11/8 | Object manipulation: contact, admissible motion |
| 8th | 11/15 | Object manipulation: grasping, form/force closure |
| 9th | 11/22 | Compliance: potential energy, stiffness matrix |
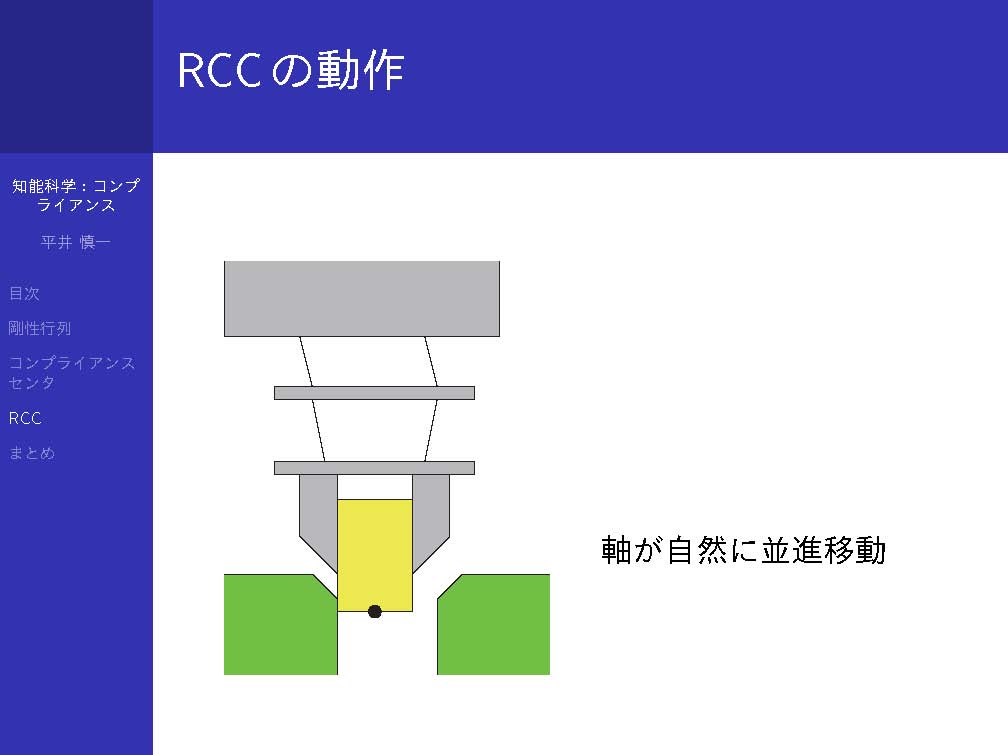
| 10th | 11/29 | Compliance: center of compliance, RCC |
| 11th | 12/6 | Computer vision: digital images, 2D Fourier transform (2nd quiz) |
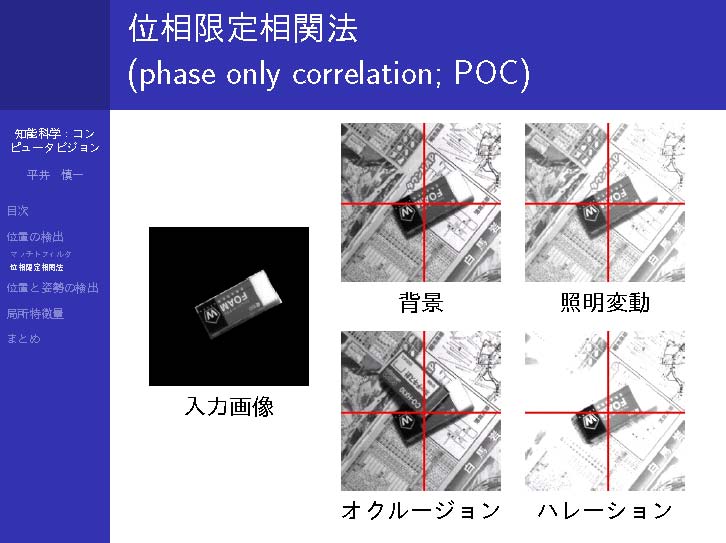
| 12th | 12/13 | Computer vision: matched filter, phase-only matching, rotation-invariant POM |
| 13th | 12/20 | Computer vision: SIFT, SURF |
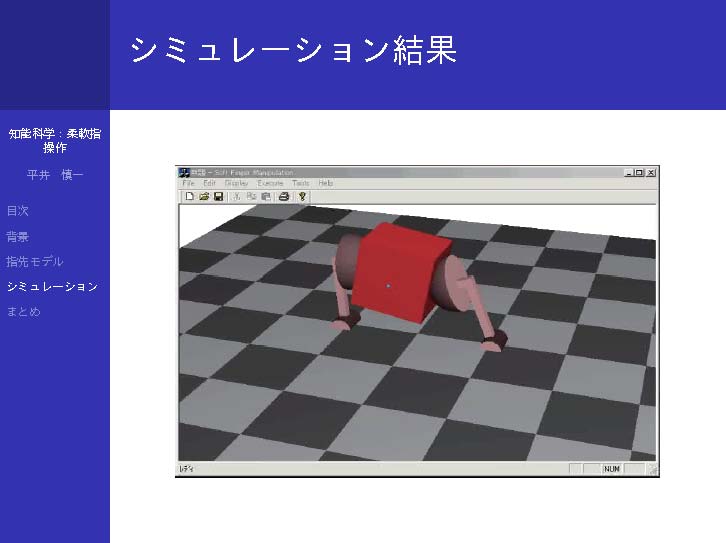
| 14th | 1/10 | Soft-fingered manipulation: fingertip model, simulation, delay |
| 15th | 1/17 | Wrap-up |