ロボットの知能は,記号を対象とする機械知能と実世界との力学的な相互作用にその源がある.本講義では,機械知能と力学的な相互作用がどのようにロボットの知能を構成するかを講義する.記号を対象とする機械知能に関してはチューリングマシンや経路問題について,実世界との力学的な相互作用に関しては物体操作やコンピュータビジョンについて講義する.ロボットの知能に関する基本的な概念を理解することを目標とする.
|
第1週 | 10/ 1 | ロボットの知能: 計算,力学,知能 |
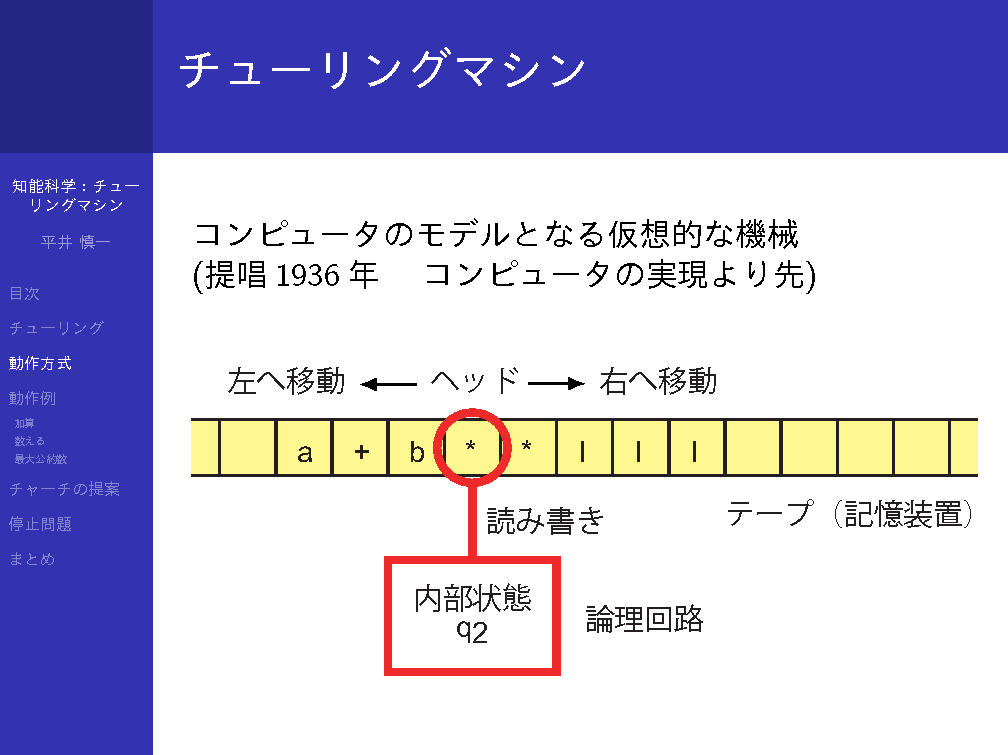
| 第2週 | 10/ 8 | チューリングマシン: 状態,入力記号,遷移規則 |
| 第3週 | 10/15 | チューリングマシン: 対角線論法,停止問題 |
| 第4週 | 10/22 | グラフと経路計画: グラフ,最短経路問題,ダイクストラ法 |
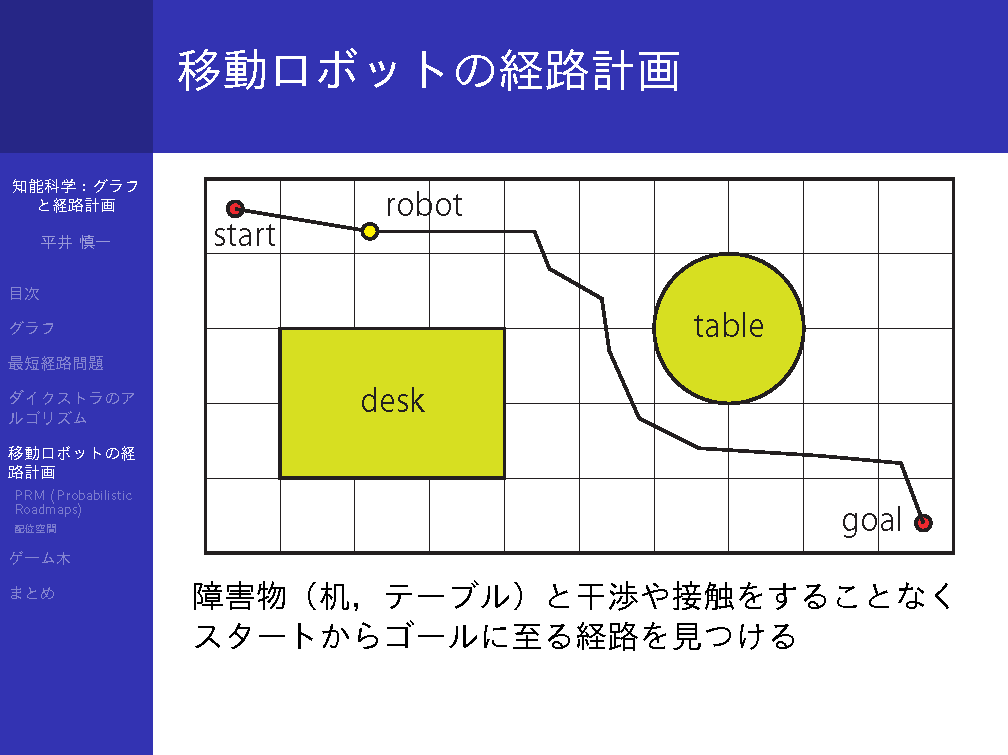
| 第5週 | 10/29 | グラフと経路計画: 移動ロボットの経路計画,Probabilistic Roadmaps,ゲーム木 |
| 第6週 | 11/12 | (小テスト) |
| 第7週 | 11/19 | コンピュータビジョン: デジタル画像,二次元フーリエ変換 |
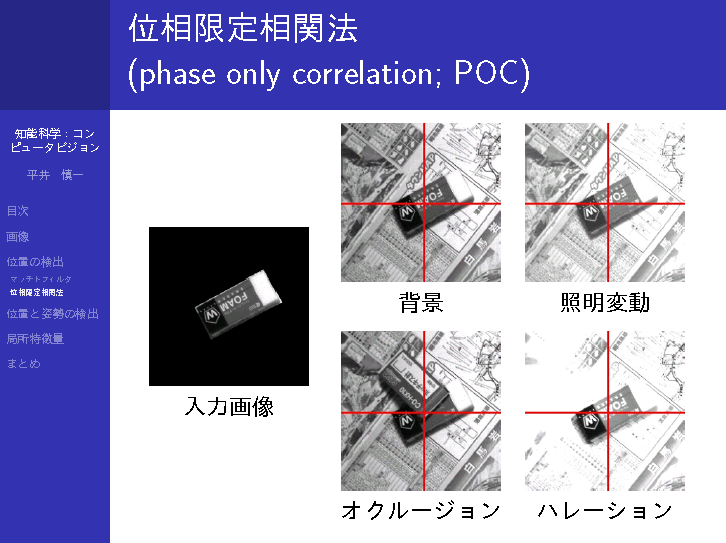
| 第8週 | 11/26 | コンピュータビジョン: マッチドフィルタ,位相限定相関法,回転不変位相限定相関法 |
| 第9週 | 11/30 | コンピュータビジョン: SIFT,SURF |
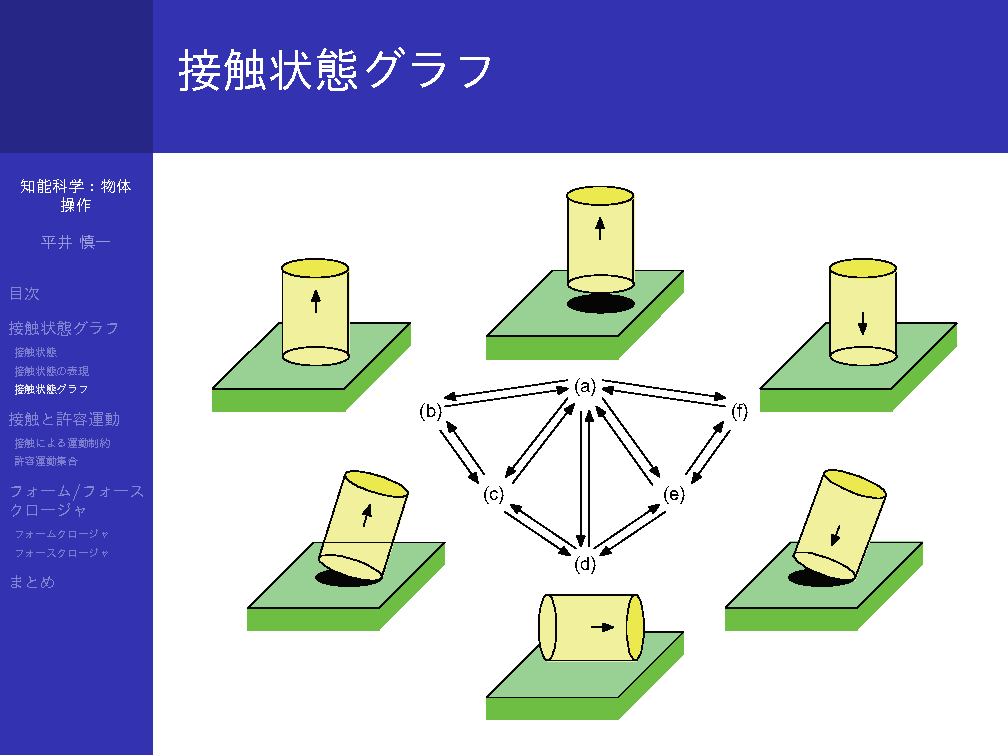
| 第10週 | 12/ 3 | 物体操作: 接触状態,接触状態グラフ |
| 第11週 | 12/10 | 物体操作: 運動制約,許容運動 |
| 第12週 | 12/17 | 物体操作: フォーム/フォースクロージャ |
| 第13週 | 12/24 | (小テスト) |
| 第14週 | 1/ 7 | コンプライアンス: ポテンシャルエネルギー,剛性行列 |
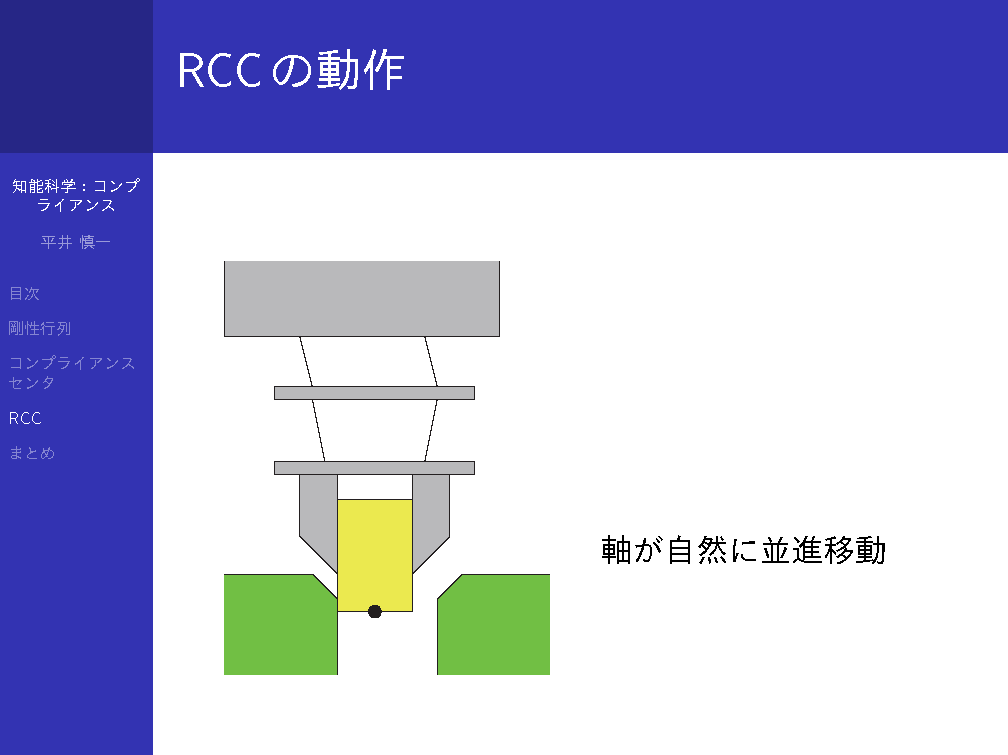
| 第15週 | 1/14 | コンプライアンス: コンプライアンス中心,RCC |