Learn how to use mathematics in robotics, focusing on
calculus on vectors and matrices, calculus of differentials, and
ordinary differential equations.
(Dept. Robotics, B2)
|
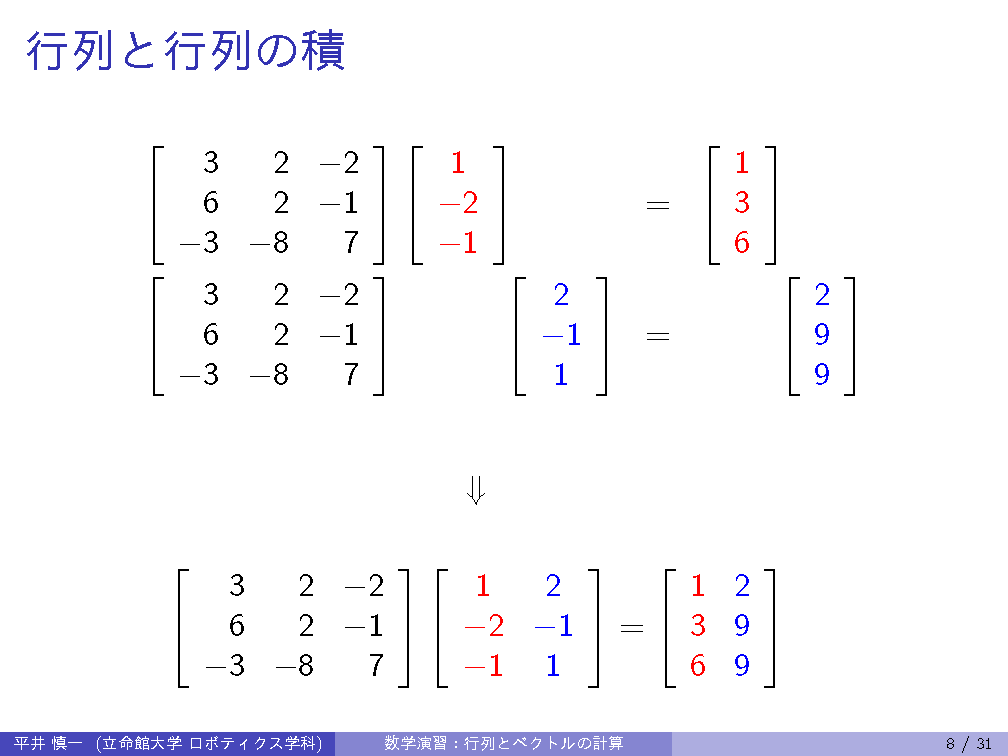
1st | 9/28 | Calculus of vectors and matrices: vectors, matrix, block decomposition |
| 2nd | 10/ 5 | Calculus of vectors and matrices: vectors, matrix, block decomposition |
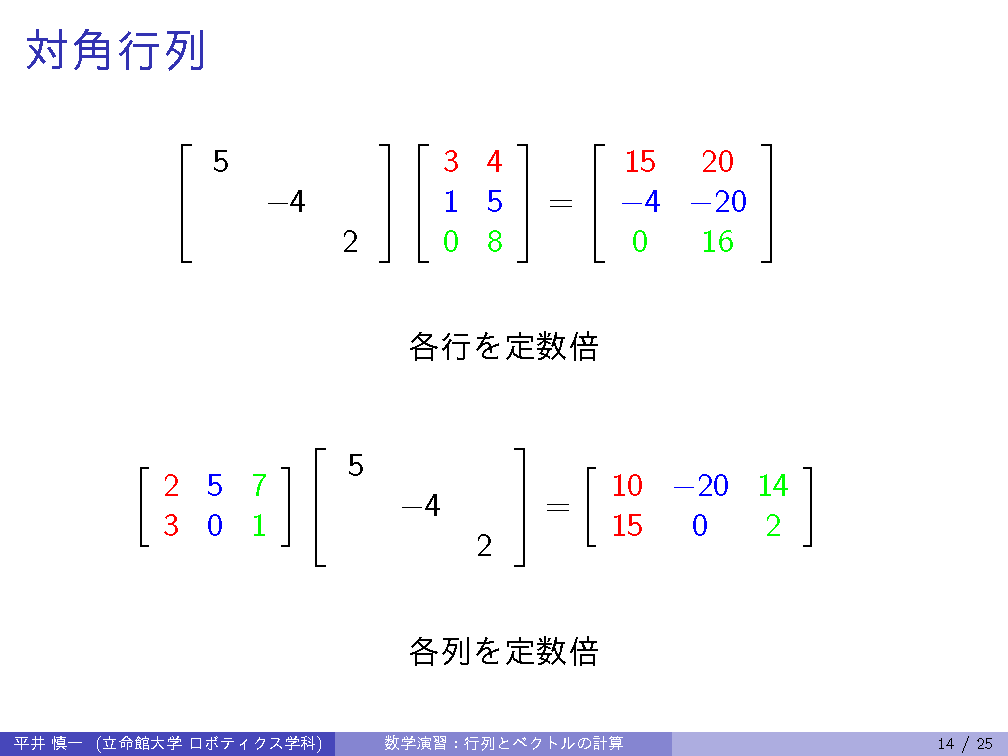
| 3rd | 10/19 | Calculus of vectors and matrices: diagonal, triangular matrix, permutation matrices |
| 4th | 10/22 | Calculus of vectors and matrices: diagonal, triangular matrix, permutation matrices |
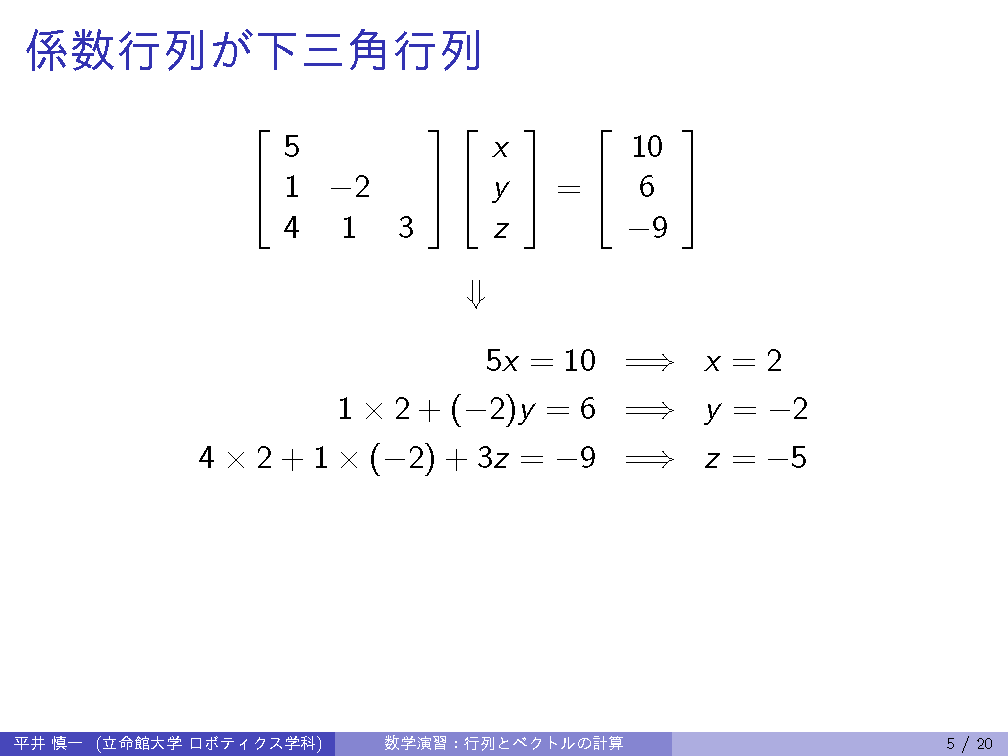
| 5th | 10/26 | Calculus of vectors and matrices: linear equation, LU decomposition |
| 6th | 11/ 2 | Calculus of vectors and matrices: linear equation, LU decomposition |
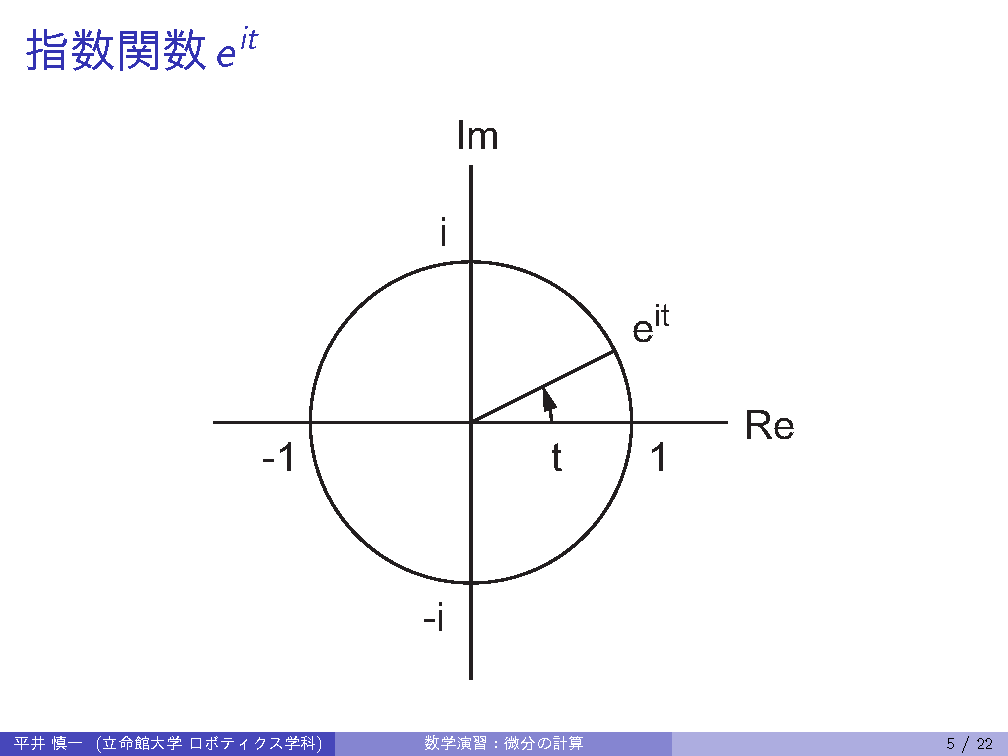
| 7th | 11/ 9 | Calculus of differentials: complex numbers/polar form, differentiating exponential/trigonometric functions |
| 8th | 11/16 | Calculus of differentials: complex numbers/polar form, differentiating exponential/trigonometric functions |
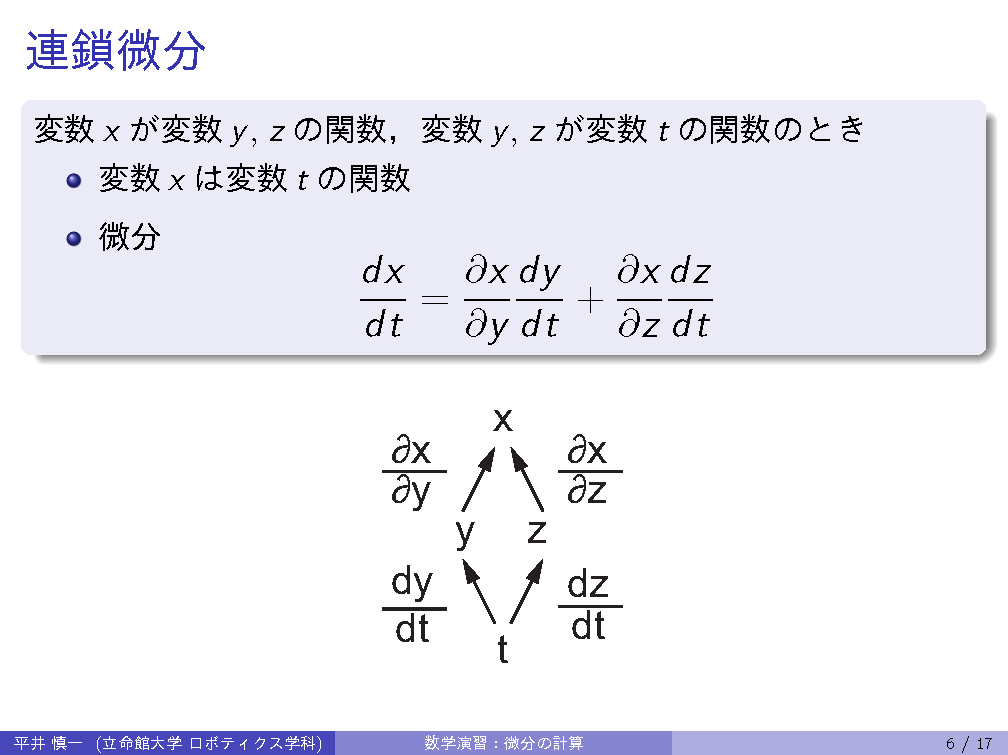
| 9th | 11/23 | Calculus of differentials: chain rule, differentiating products/quotients |
| 10th | 11/30 | Calculus of differentials: chain rule, differentiating products/quotients |
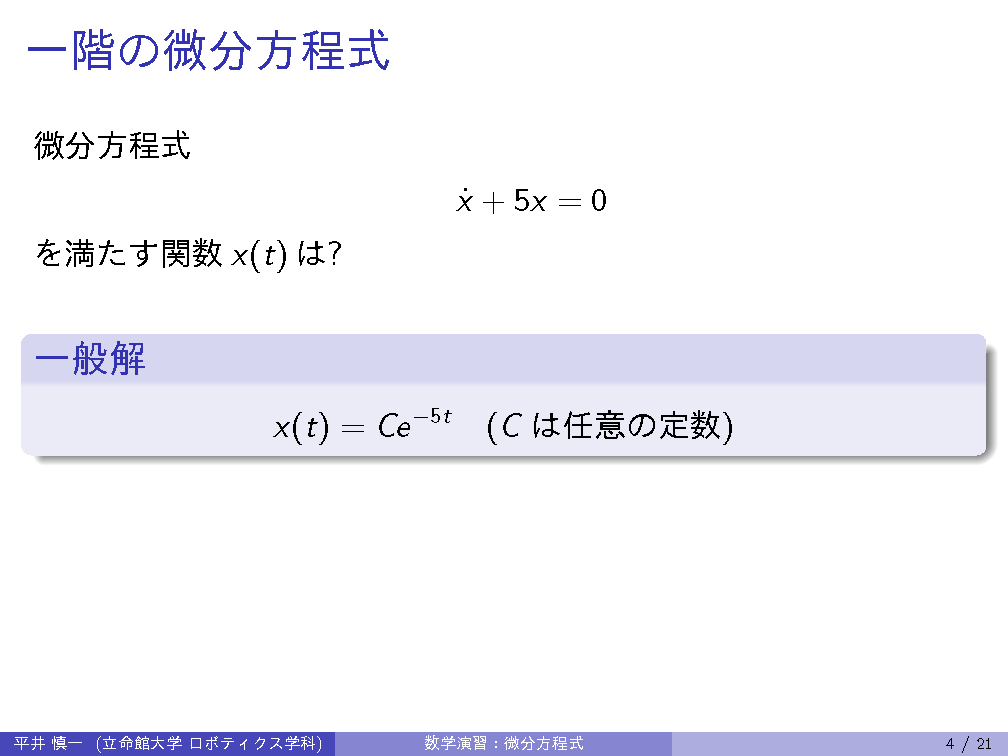
| 11th | 12/ 7 | Ordinary differential equation: linear constant-coefficient ODE, characteristic equation |
| 12th | 12/10 | Ordinary differential equation: linear constant-coefficient ODE, characteristic equation |
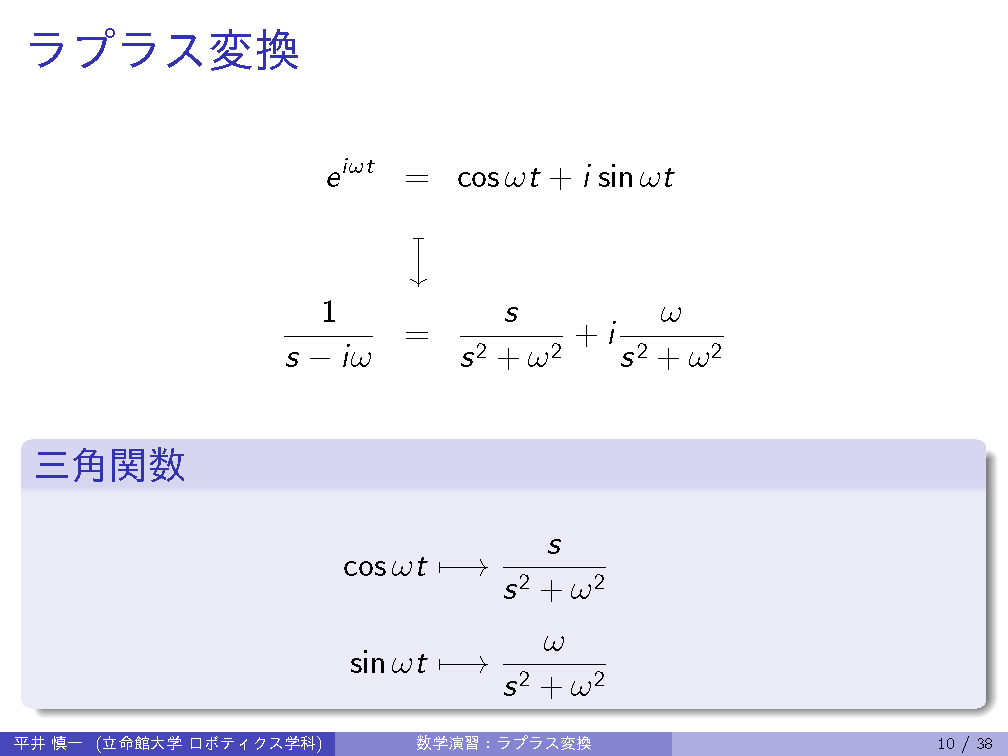
| 13th | 12/21 | Ordinary differential equation: Laplace transform, solving ODE's using Laplace transform |
| 14th | 1/11 | Ordinary differential equation: Laplace transform, solving ODE's using Laplace transform |
| 15th | 1/18 | Wrap up |