I will lecture principles of computational and mechanical intelligence, covering Turing machine, search, probabilistic methods, neural network, optimization, and object manipulation. (Dept. Robotics, B2)
|
1st | 9/28 | Robot Intelligence: computation, mechanics, intelligence |
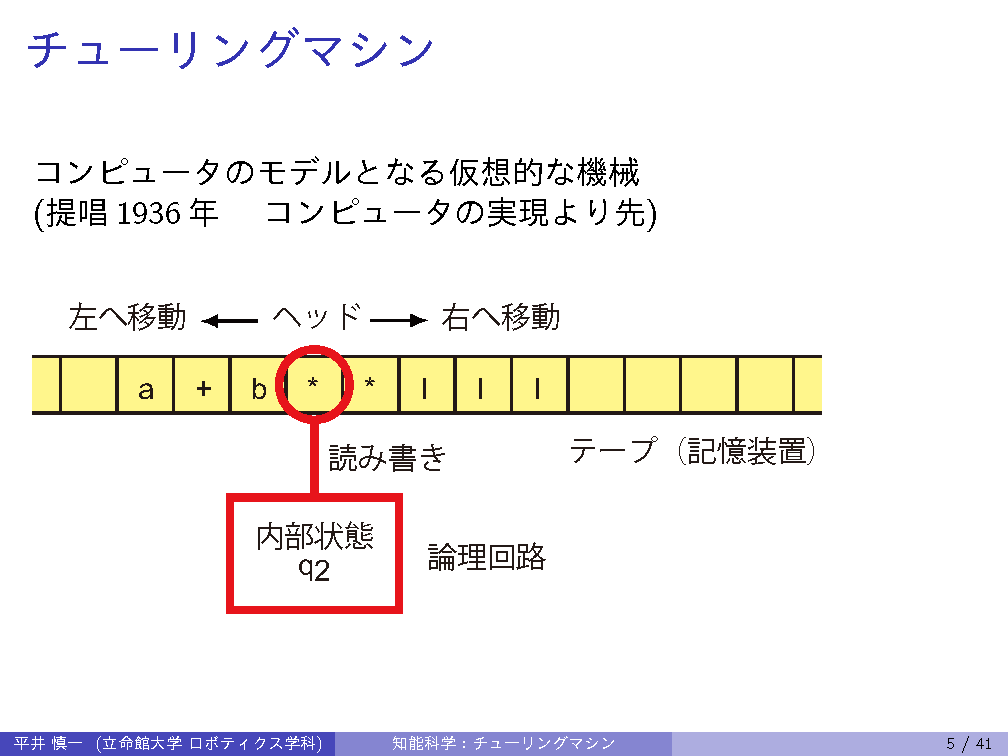
| 2nd | 10/ 5 | Turing machine: state, symbols, transition |
| 3rd | 10/12 | Turing machine: diagonal argument, halt problem |
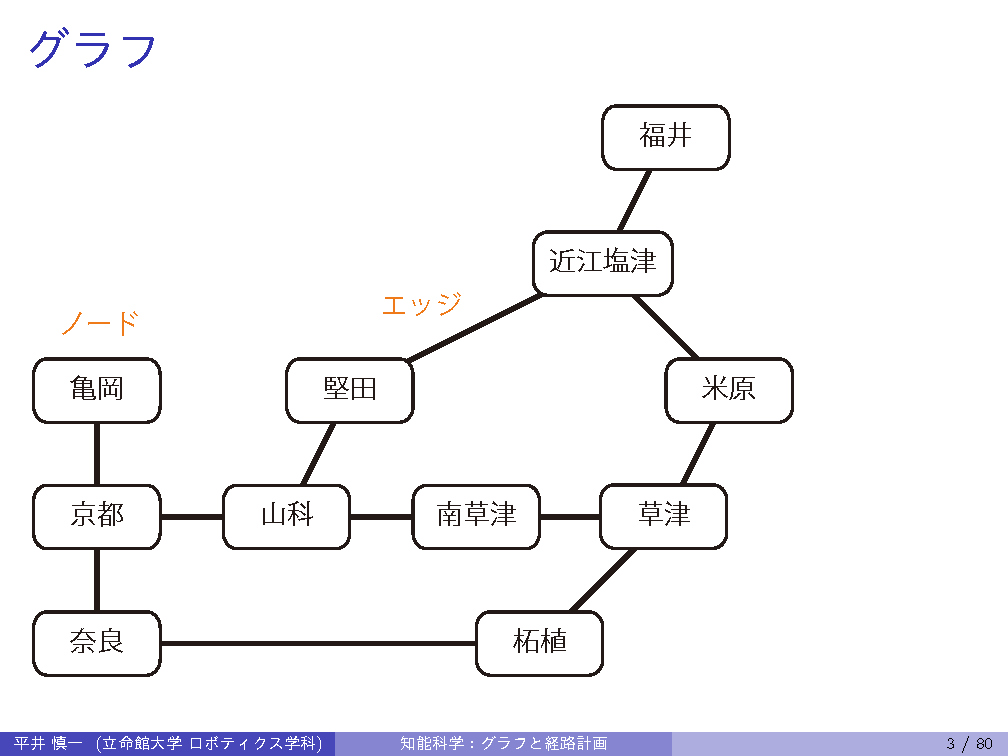
| 4th | 10/19 | Search: graphs, shortest path, Dijkstra method |
| 5th | 11/26 | Search: maximum flow problem, LP method |
| 6th | 11/ 2 | Search: game tree, minimax method, two-person zero-sum game |
| 7th | 11/ 9 | Probabilistic method: random numbers, Monte Carlo method |
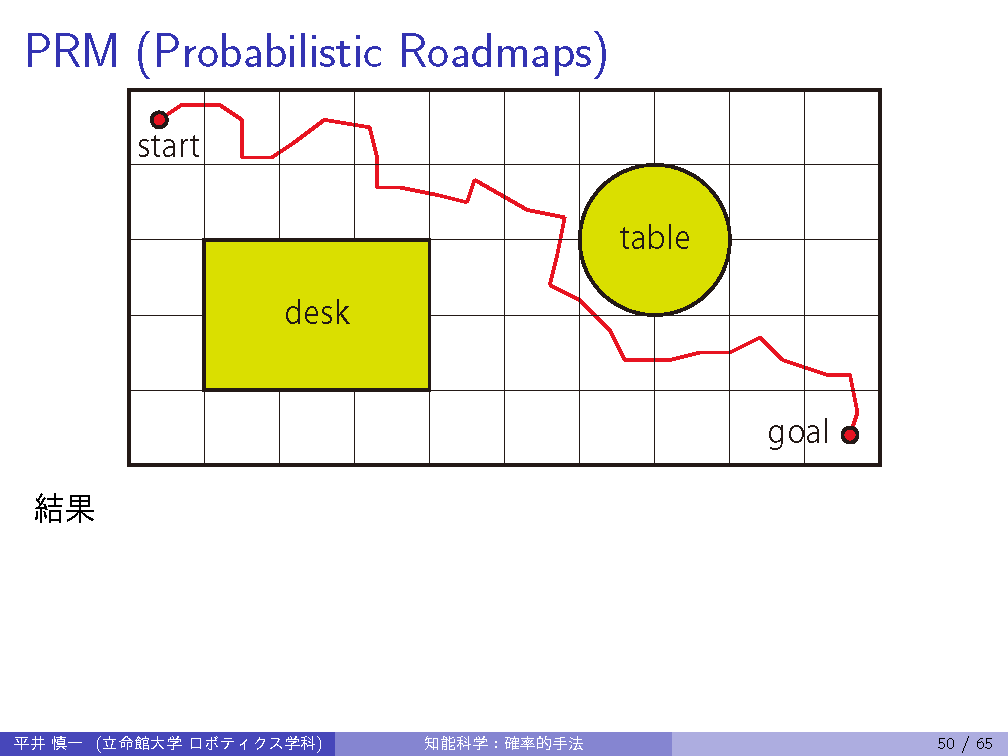
| 8th | 11/16 | Probabilistic method: robot motion planning, probabilistic roadmaps |
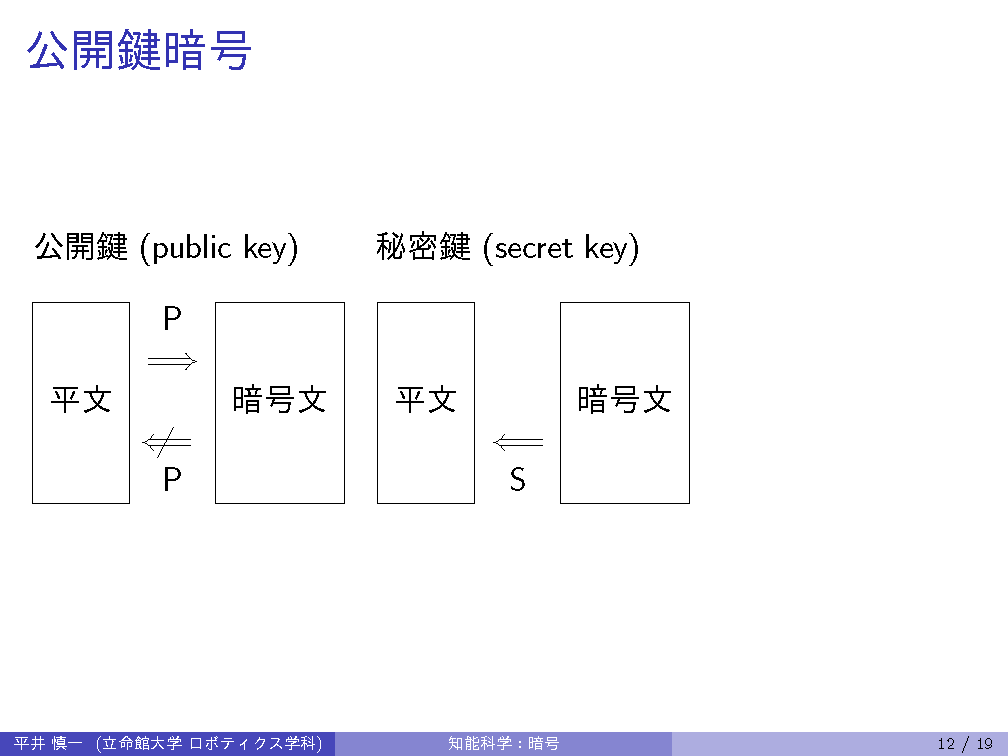
| 9th | 11/23 | Cryptography: substitution cipher, public-key cryptography |
| 10th | 11/30 | Neural network: neuron model, approximation theorem |
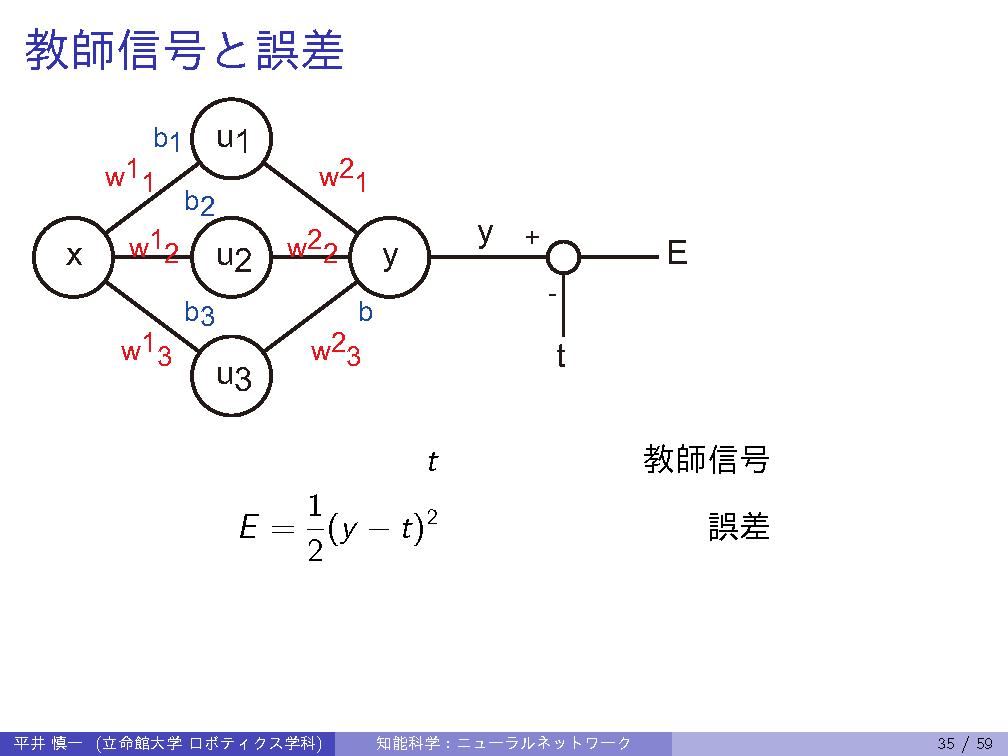
| 11th | 12/ 7 | Neural network: back propagation |
| 12th | 12/14 | Optimization: linear programming |
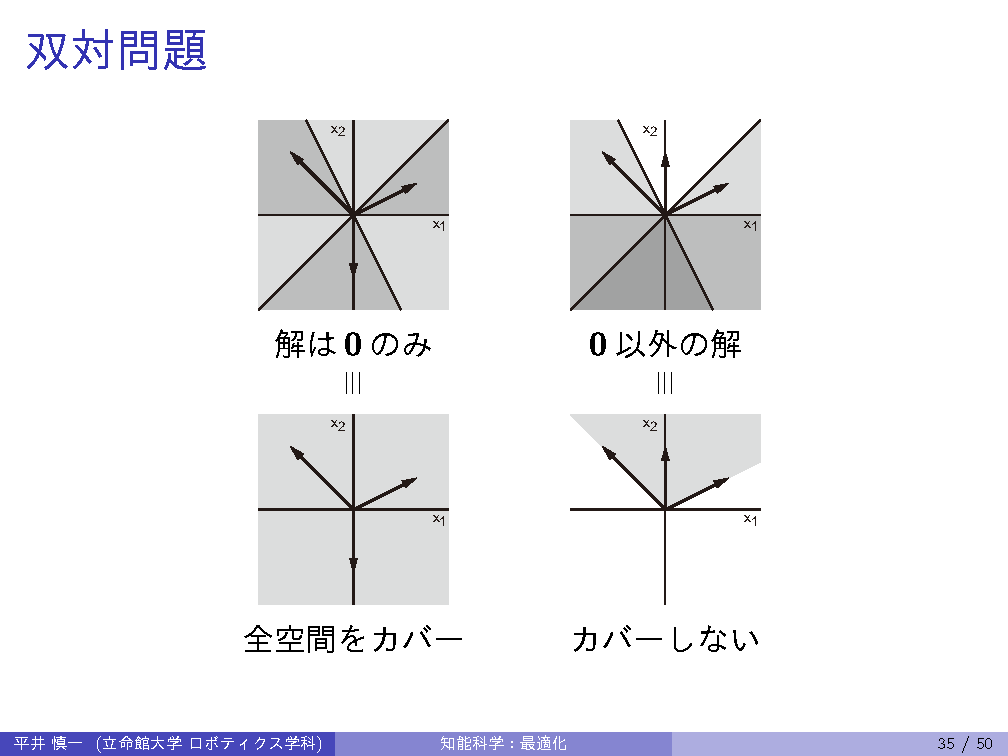
| 13th | 12/21 | Optimization: linear inequalities, duality, nonlinar optimization |
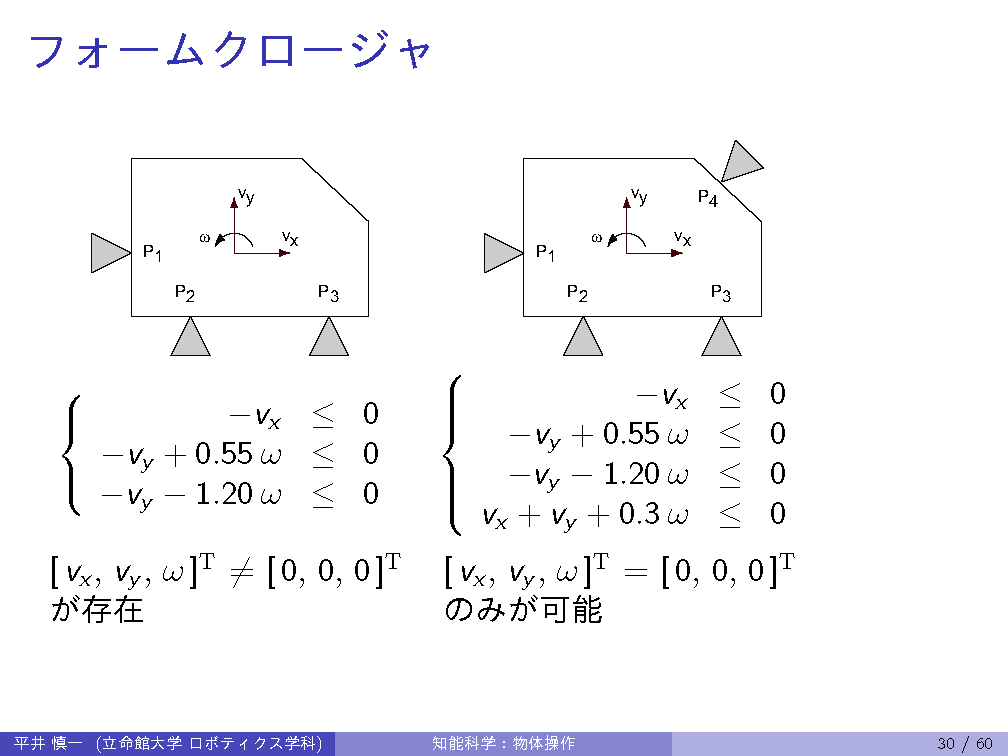
| 14th | 1/ 9 | Object manipulation: motion constraints, form closure |
| 15th | 1/18 | Object manipulation: grasping, force closure |