Physics of Soft Bodies
Handouts
Physics of Soft Bodies
(reduced copy)
Motion and Deformation
Finite Element Approximation
Sample Programs: One-dimensional Soft Body Model
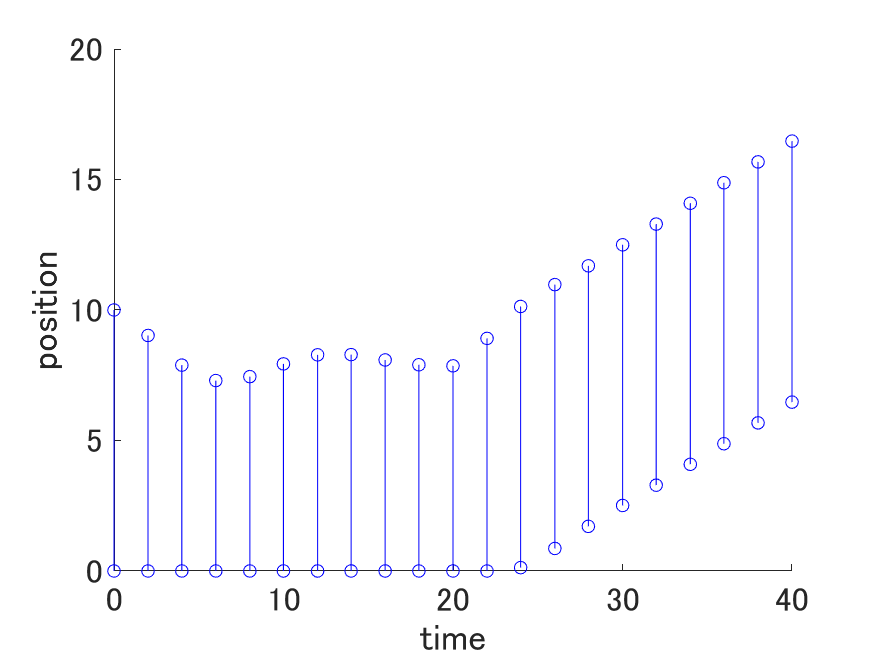
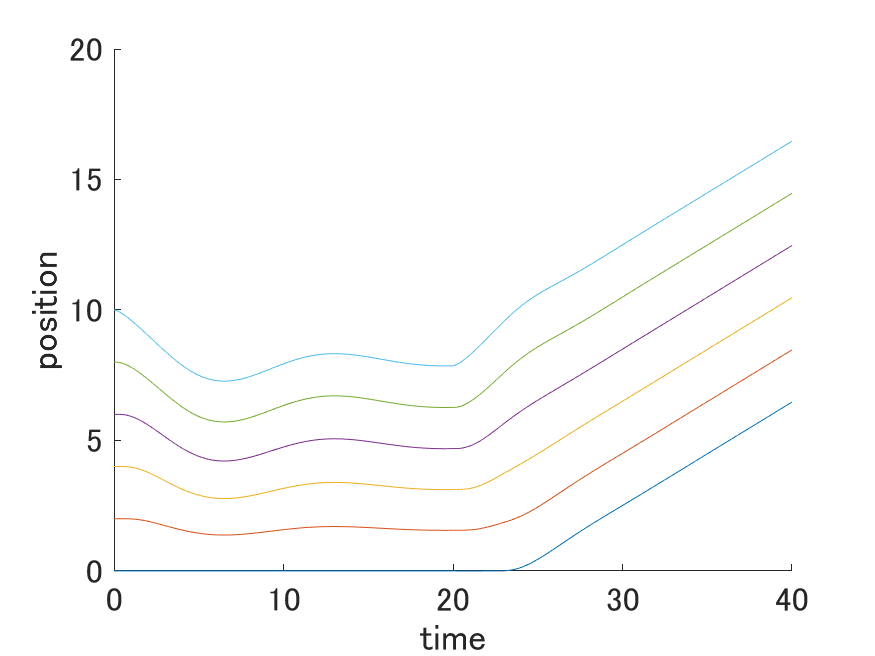
dynamic deformation of a 1D soft body model
dynamic equation under constraint
dynamic equation of free motion
pushing force
reaction force from floor
searching a specified value in ascending ordered column vector
Sample Programs: Two-dimensional Soft Body Model
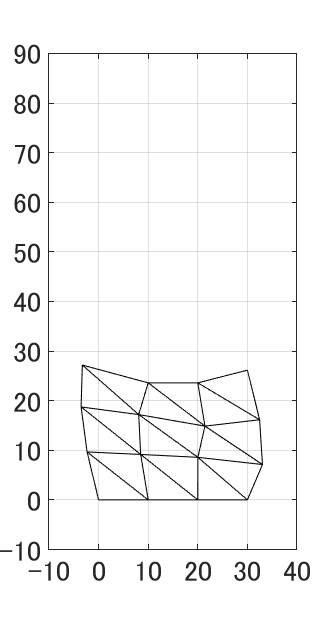
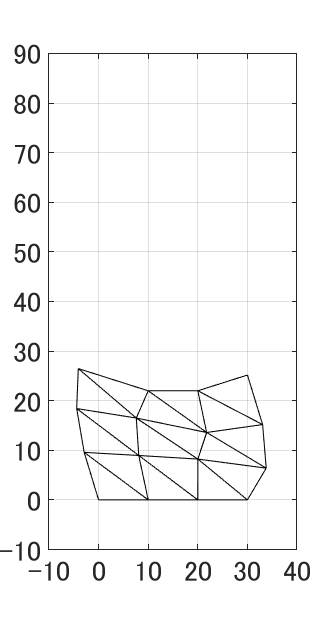
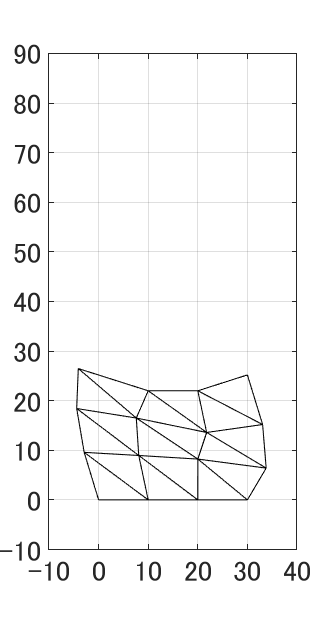
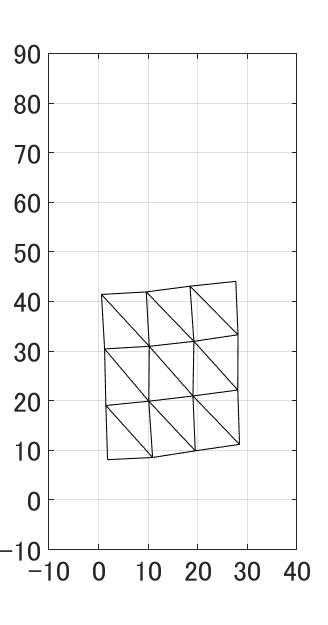
jumping 2D soft robot model (4×4)
jumping 2D soft robot model (10×10)
equation of motion (when pushing the square top)
equation of motion (after releasing the pushing)
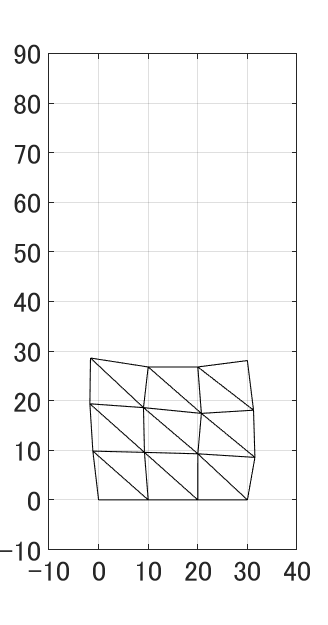
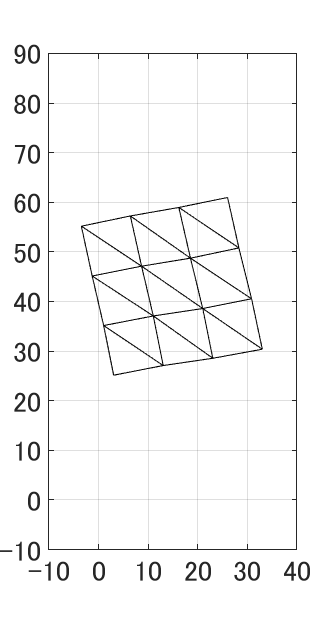
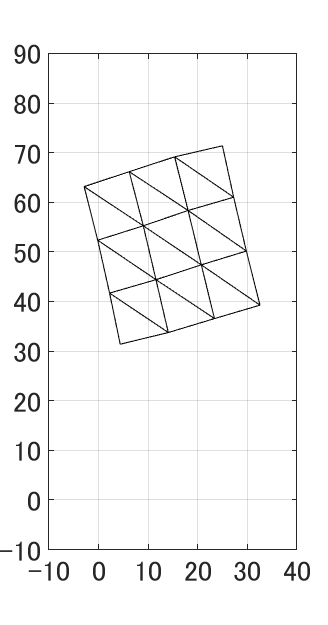
deforming 2D soft robot model (4×4)
deforming 2D soft robot model (10×10)
equation of motion (when pushing the square top)
equation of motion (after releasing the pushing)
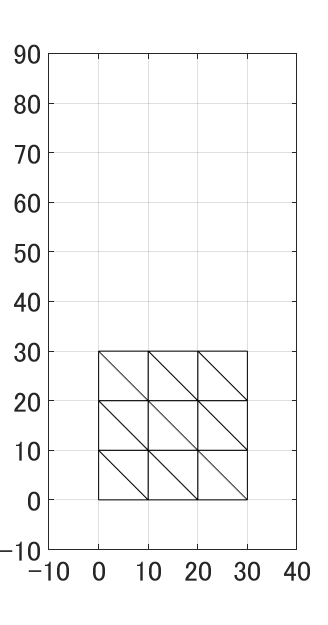
nodal points and triangles of a rectangular body
calculating inertia matrix
calculating partial inertia matrix
calculating Lamé's constants
calculating connection matrices
calculating partial connection matrices
displacement of pushing points
velocity of pushing points
reaction force from floor
reaction force from a floor edge
drawing object shape
searching a specified value in ascending ordered column vector
(movie)
(movie)
Elastic and Inelastic Models
(movie)
(movie)
Linear Body Model
(movie)
(movie)