![[JS2]](shock2000-1-230x230.jpg)
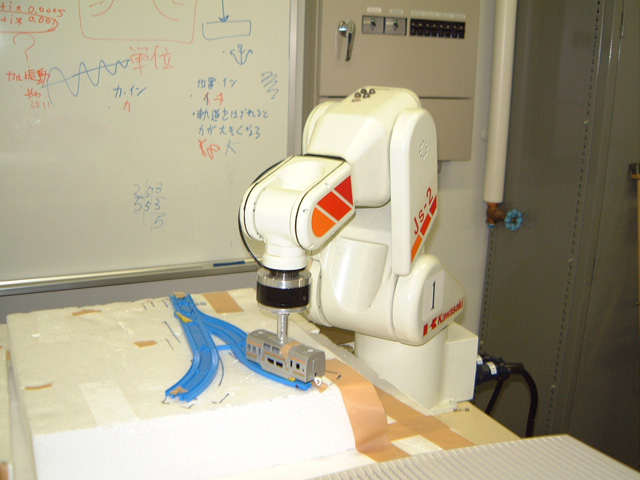
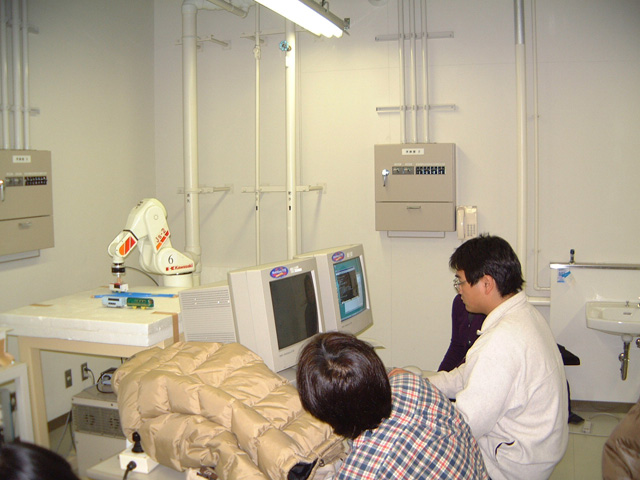
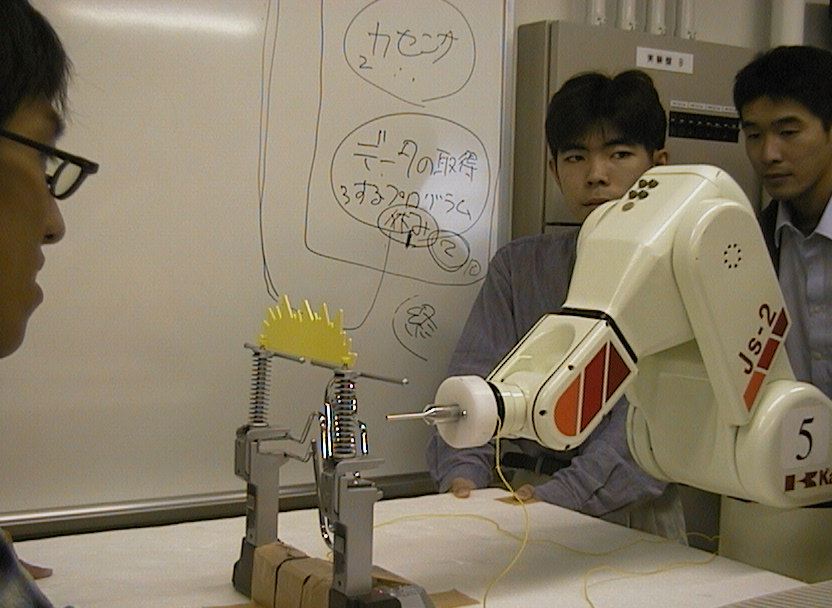
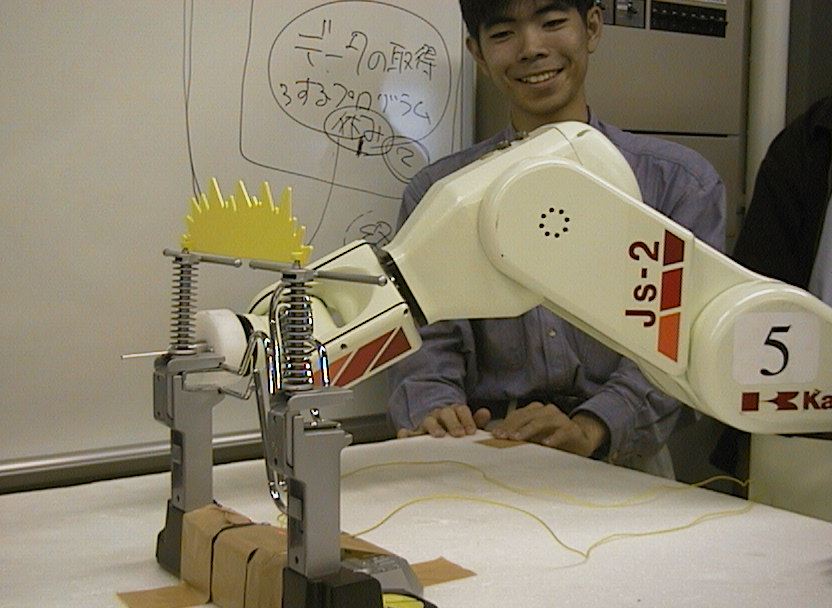
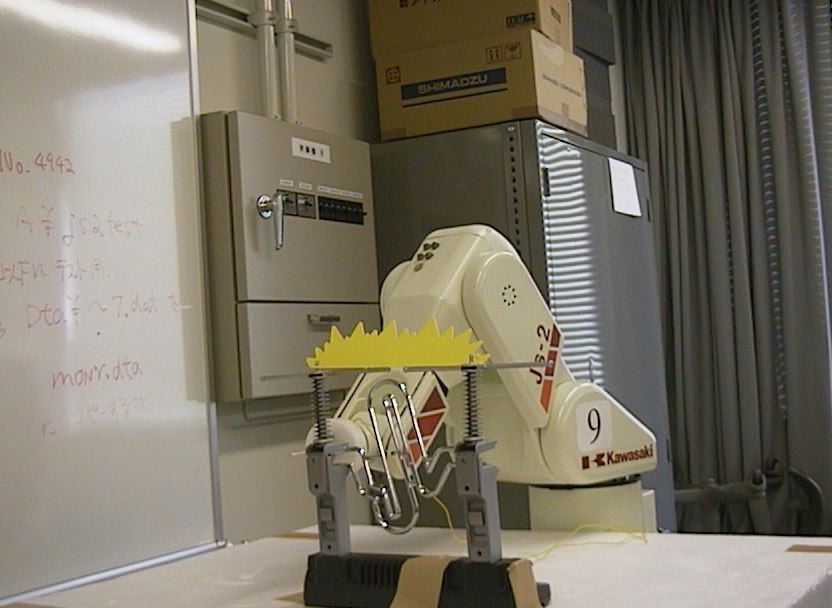
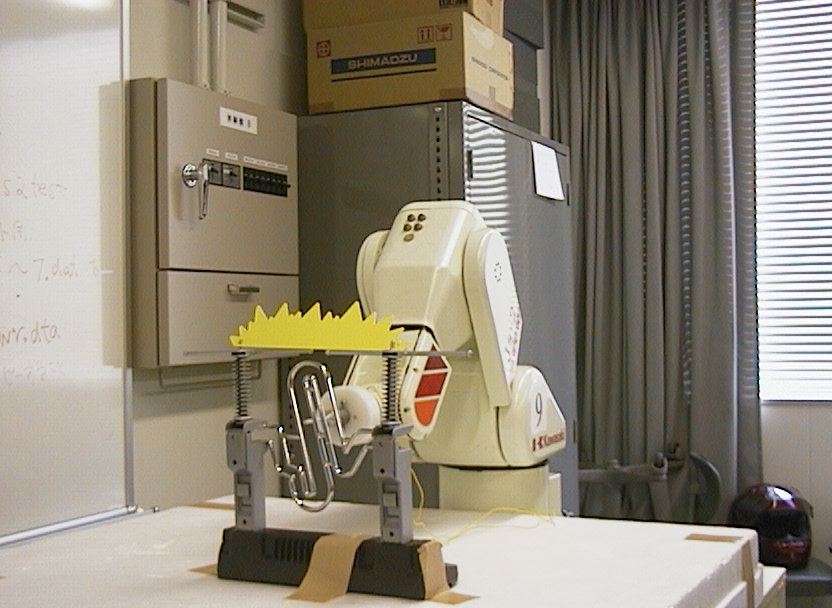
ティーチング
プレイバック
(MPEG 1.0MB)
![[JS2]](shockbarexplain-230x230.jpg)
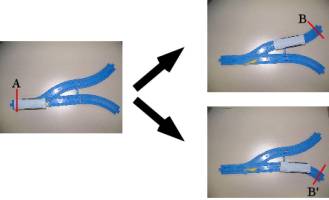
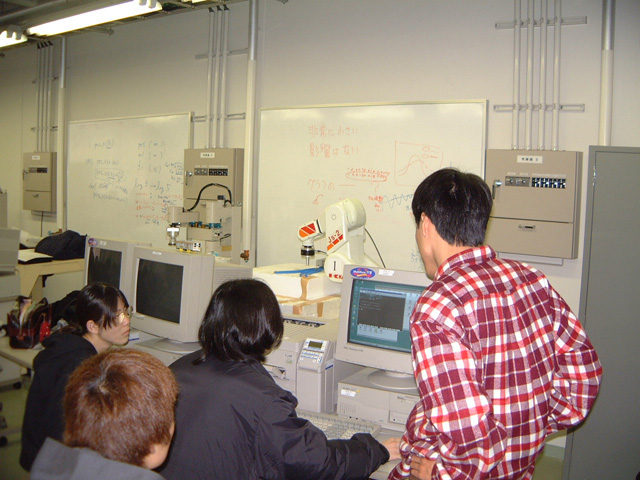
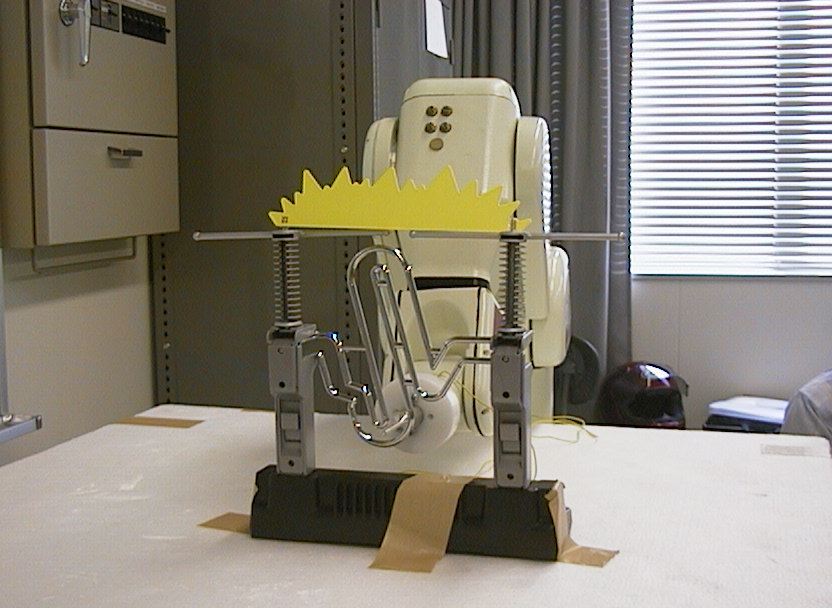
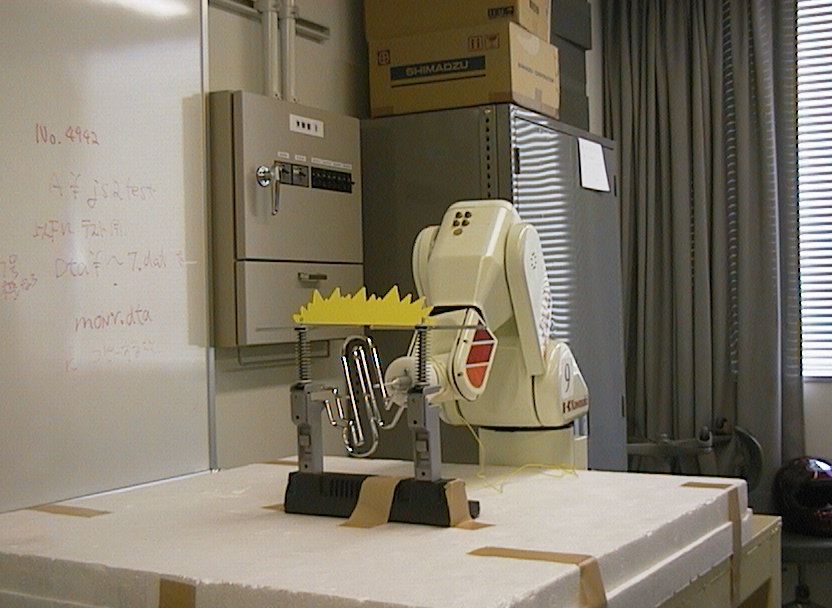
電撃イライラ棒の
軌道計画を説明
(MPEG 18.5MB)

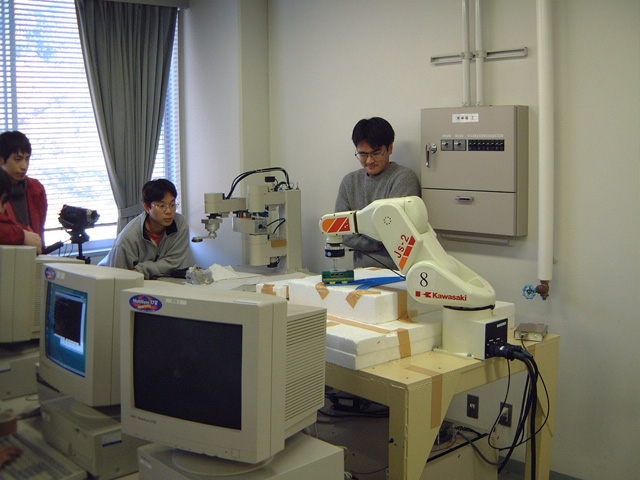
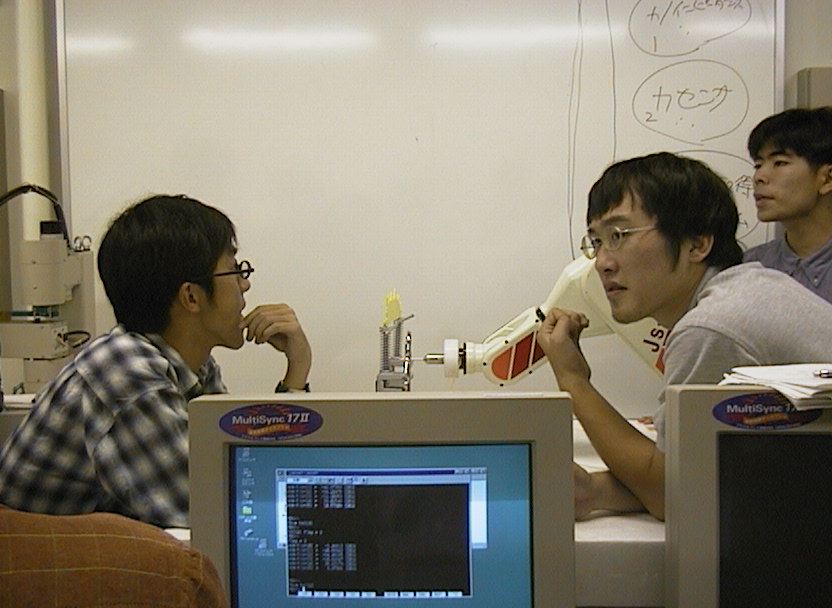
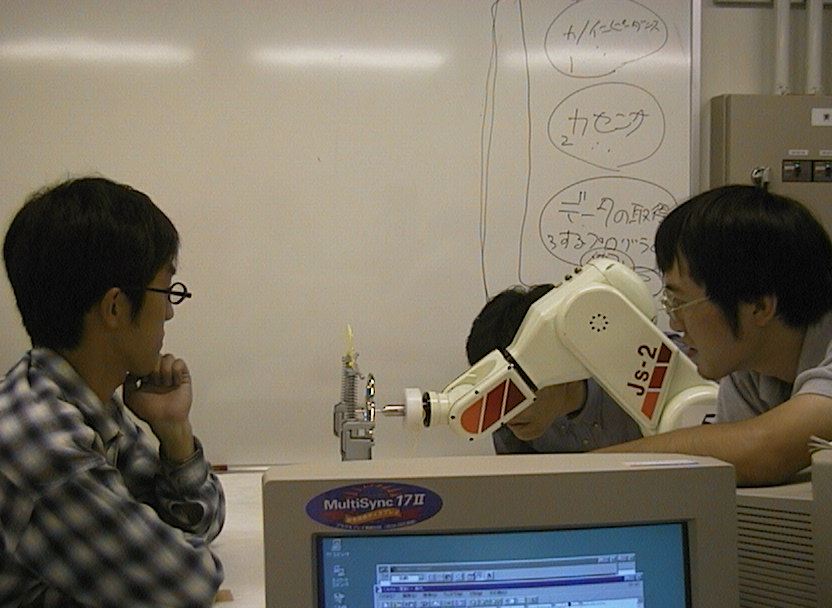
ロボット作業実習
自由課題コンテスト
自由課題コンテスト
課題作業
手先に6軸力センサを装着した小型6自由度産業用ロボットに基本作業や応用作業を行わせることにより,ロボット作業工学,ロボット機構学,ロボット運動制御等の講義で学習した知識を統合して応用する能力を養うことを目的とする.また,ロボットによる作業法を創意工夫することにより創造力を涵養する.
| 第1週 | 実験装置の説明 | |
| 第2,3週 | ティーチングプレイバックによる位置・軌道制御 | |
| 第4〜6週 | 運動・インピーダンス制御 | |
| 第7〜9週 | 力・インピーダンス制御 | |
| 第10〜14週 | 課題作業 |
| 評価: | 出席とレポート |
| 教科書: | プリントを適宜配布する |
|
ティーチング プレイバック (MPEG 1.0MB) |
電撃イライラ棒の 軌道計画を説明 (MPEG 18.5MB) |
ロボット作業実習 自由課題コンテスト |
自由課題コンテスト 課題作業 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/shock2.jpg) ティーチング プレイバック (電撃イライラ棒) |
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/shock6.jpg) ティーチング プレイバック (電撃イライラ棒) |
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/roller0.jpg) 運動/力/ インピーダンス制御 (ローラー転がし) |
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/roller3.jpg) 運動/力/ インピーダンス制御 (ローラー転がし) |