Soft Tissue Mechanics in Human Dexterity
via Internal Sensing
We will investigate how mechanically human soft tissues such as skin and
cartilage contribute to human motion dexterity.
Human can grasp various objects and manipulate various tools dexterously
involuntarily. Scientific researches to reveal such human dexterity
have been conducted so far. In physiology, grasp configuration
according to object shapes and activity of brain-nerve system during
human hand motion has been studied. Signal transmission along nerve
lines and brain activities during human manipulating objects have been
investigated and plenty of observation have been reported. But,
mechanics of human dexterous manipulation including objects has not been
clarified yet. In robotics, haptic perception through soft tissues has
been analyzed mechanically and object grasping via soft fingertips has
been studied. It turns out that soft tissues work as mechanical filters
during haptic perception and shaping of potential energy contributes to
secure object grasping. Unfortunately, it is not clear if such theories
can be applied to actual human grasping and manipulation.
In this research project, we will measure inner deformation of soft
tissues such as human skin and cartilage during grasping and manipulation
via MR (magnetic resonance) technology and investigate the mechanics of
soft tissues in human dexterous manipulation.
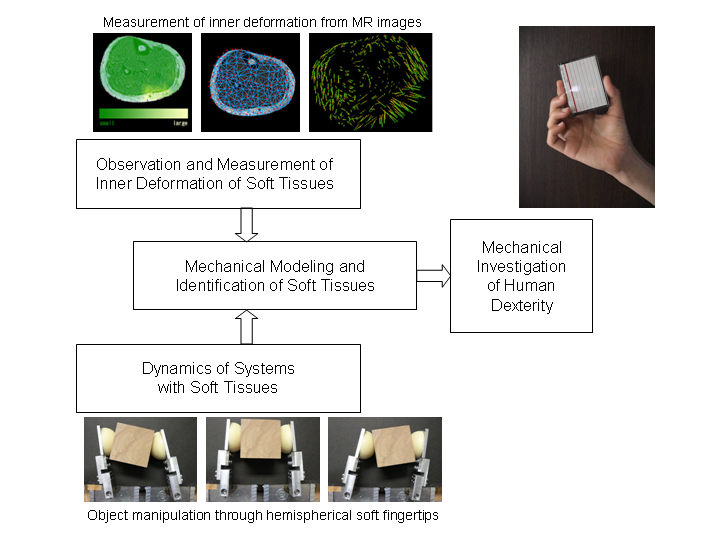
This project consists of the following research topics:
- Measurement of inner deformation of human hands/fingers via MR device
- Computation of inner deformation fields from MR volumetric images
- Mechanical modeling and identification of soft tissues
- Mechanical modeling of three-dimensional soft-fingered manipulation
- Dynamic simulation of human grasping and manipulation
First, we will clarify condition for MR imaging that enables the
measurement of human soft tissues. Especially, we will establish a
method to measure inner deformation of human hands/fingers during
grasping and manipulation.
Second, We will establish a technique to compute the inner deformation
field from multiple MR volumetric images. We will investigate robust
computation of deformation fields.
Third, we will investigate the modeling of soft tissues and the
identification of model parameters involved. We will extend our
viscoelastic/viscoplastic/rheological deformation models so that the
soft tissue deformation can be described approproately. In addition to
soft tissue modeling, we will formulate boundary conditions due to
contact among fingers and objects.
Fourth, we will formulate object grasping and manipulation in 3D space
performed by soft fingertips. We will realize dynamic simulation of
object grasping and manipulation in 3D space considering soft tissue
deformation. Through dynamic simulation, we will investigate the
mechanics of soft tissues during object grasping and manipulation to
show that potential energy contributes to human grasping and
manipulation.
proposal (in Japanese)
|
Hirai, Shinichi |
Professor, Dept. Robotics, Ritsumeikan Univ. |
|
Tanaka, Hiromi |
Professor, Dept. Computer Science, Ritsumeikan Univ. |
|
Inubushi, Toshiro |
Professor, Biomedical MR Center, Shiga Univ. of Medical Science |
|
Morikawa, Shigehiro |
Associate Professor, Biomedical MR Center, Shiga Univ. of Medical Science |
|
Inoue, Takahiro |
Assistant Professor, Dept. System Eng. of Sports, Okayama Prefectural Univ. |
|
Kita, Yasuyo |
Interactive Vision Group, Information Tech. Research Inst., AIST |
|
Tokumoto, Shinichi |
Researcher, Industrial Tech. Center of Wakayama Prefecture |
report (in Japanese)
Books
Book Chapters
Articles
- Zhongkui Wang, Kazuki Namima, and Shinichi Hirai,
Physical Parameter Identification of Uniform Rheological Deformation Based on FE Simulation,
Trans. Japanese Society for Medical and Biological Engineering, Vol.47, No.1, pp.1-6, 2009
- Penglin Zhang, Shinichi Hirai, and Kazumi Endo,
A Feature Matching-based Approach to Deformation Fields Measurement from MR Images of Non-rigid Object,
Int. J. of Innovative Computing, Information and Control, Vol.4, No.7, pp.1607-1615, July, 2008
Conference Papers
- Van Ho Anh, Viet Dzung Dao, Susumu Sugiyama, and Shinichi Hirai,
Analysis of Sliding of a Soft Fingertip Embedded with a Novel Micro Force/Moment Sensor: Simulation, Experiment, and Application,
Proc. IEEE Int. Conf. on Robotics and Automation, pp.889-894, Kobe, May 12-17, 2009
- Zhongkui Wang, Kazuki Namima, and Shinichi Hirai,
Physical Parameter Identification of Rheological Object Based on Measurement of Deformation and Force,
Proc. IEEE Int. Conf. on Robotics and Automation, pp.1238-1243, Kobe, May 12-17, 2009
- Takahiro Inoue and Shinichi Hirai,
Parallel-distributed Model in Three-dimensional Soft-fingered Grasping and Manipulation,
Proc. IEEE Int. Conf. on Robotics and Automation, pp.2092-2097, Kobe, May 12-17, 2009
- Takahiro Inoue and Shinichi Hirai,
Task-selection Control by Thumb and Forefinger Based on Softfinger Contact,
Third Asia International Symposium on Mechatronics (AISM2008), Sapporo, August 27-31, 2008
- Van Ho Anh, Viet Dzung Dao, Susumu Sugiyama, and Shinichi Hirai
Force/Moment Sensing During Sliding Motion using a Micro Sensor Embedded in a Soft Fingertip,
Proc. 10th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV 2008), Dec. 17-20, Hanoi, Vietnam, 2008

|

|

|
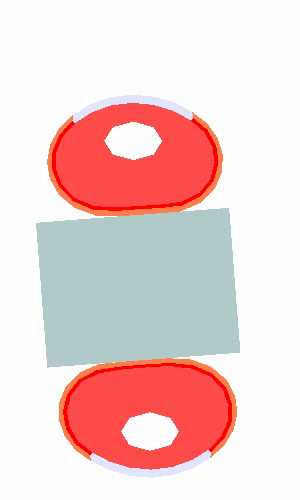
| |
| MR slices of artificial soft fingertip during object rotation |
 |
 |
 |
 |
 |
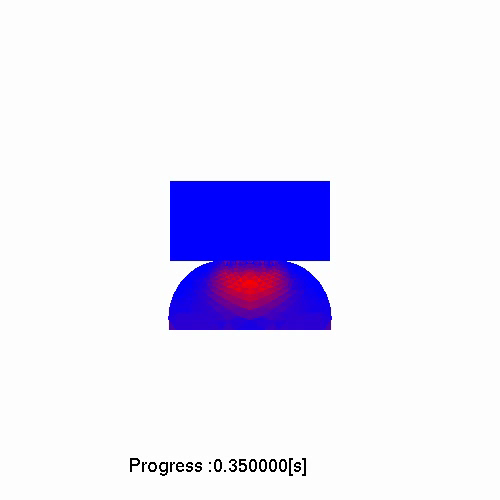
| |
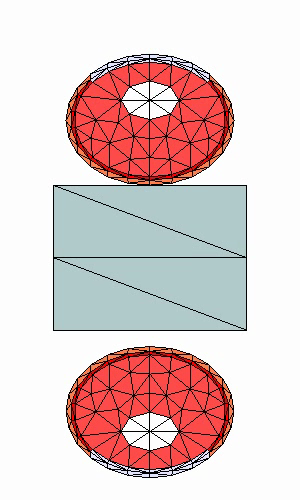
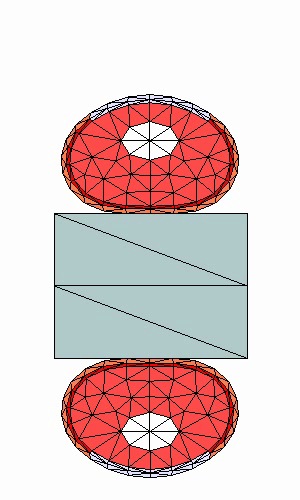
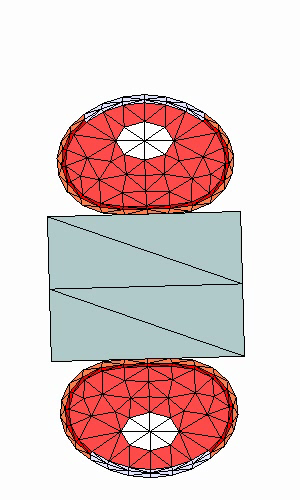
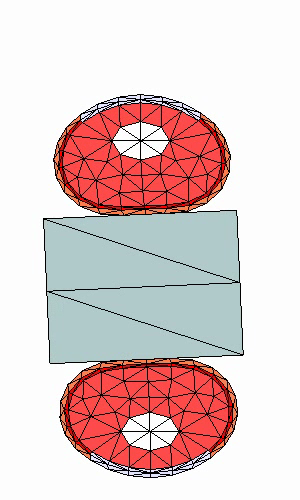
| Simulation of grasping and rotation by soft fingertips
(movie) |
|
|
|
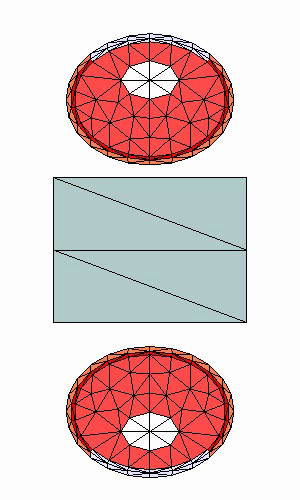
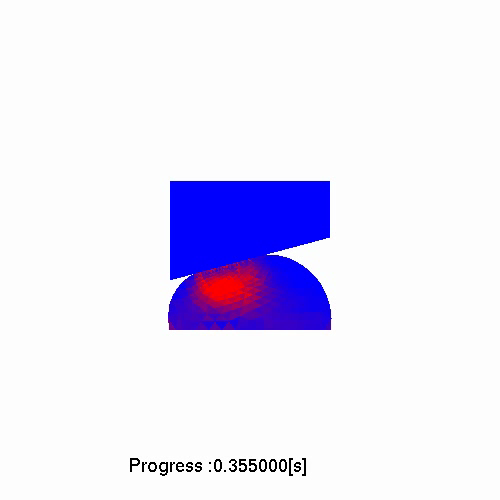
| |
| Simulation of soft-fingered grasping and manipulation |
Strain via contact between soft fingertip and object |
|
|
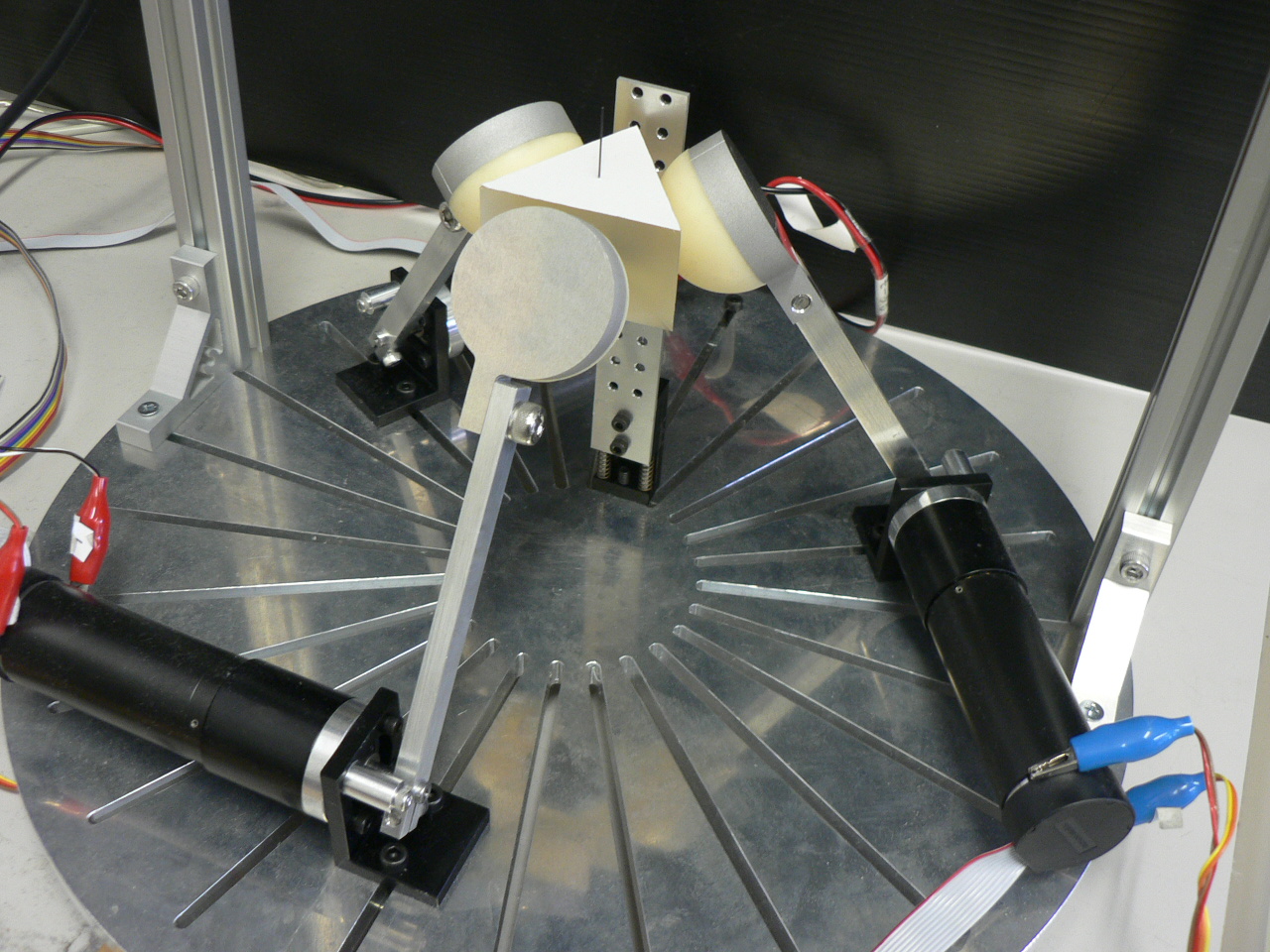
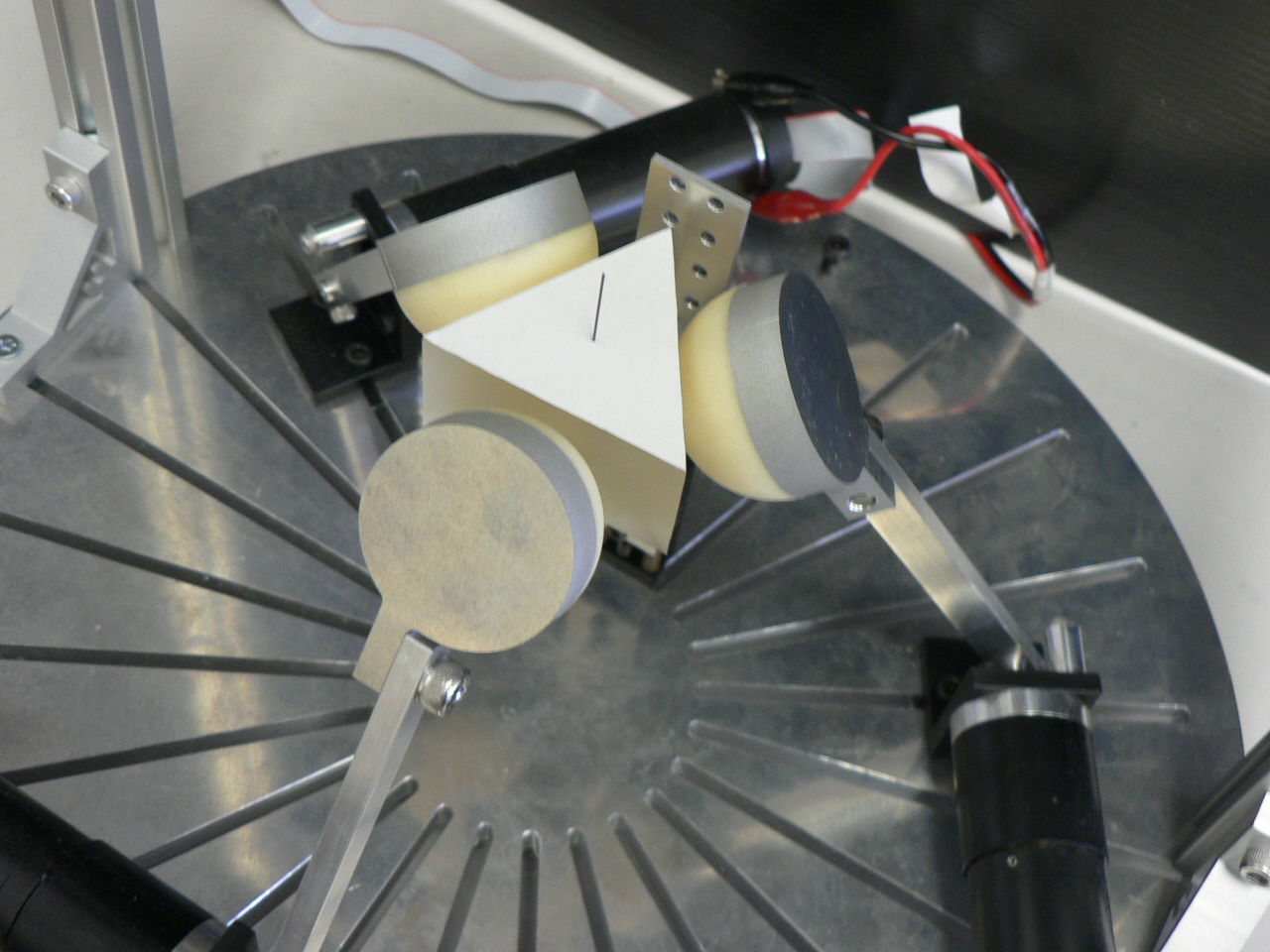
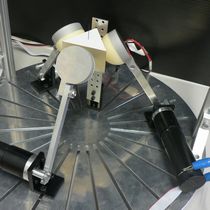
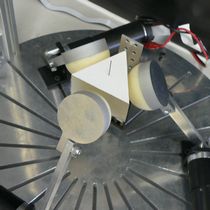
| |
| Grasping by three 1-DOF fingers with soft fingertips |