人の巧みさに関する軟組織の力学の解明
本研究の目的は,人の皮膚や軟骨などの軟組織が,人の運動の巧みさにどのように貢献しているかを力学的に解明することである.
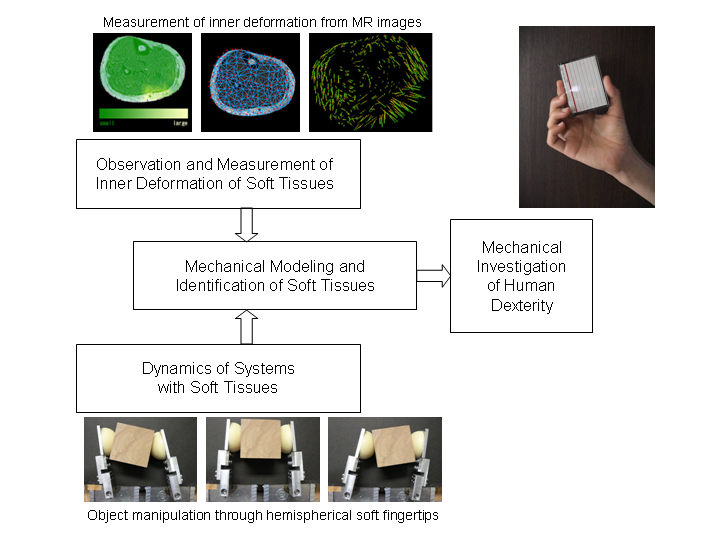
人は,意識することなく様々な物体を把持し,様々な道具を巧みに操ることができる.運動生理学やロボティクスの分野では,このような人の巧みさを解明する試みが成されてきた.運動生理学では,物体によって異なる把持形態の記述や手指の運動に関する脳神経系の活動部位の同定が進められている.人が物体を操作するときの神経内の信号伝達や脳の活動部位等,豊富な観察結果が得られているものの,対象物を含めてそれらがどのように結びつき,どのような力学で巧みな操作が可能になっているかは不明のままである.一方,ロボティクスの分野では,柔軟な組織が触覚に与える影響の力学的解析や柔軟指による物体把持の力学解析が成され,柔らかい組織が触覚のフィルターの役割を果たすことやポテンシャルエネルギーの形成を通して安定な把持と操作に寄与していることが明らかになりつつある.しかしながら実際に人の把持や操作で,力学的解析で得られたフィルターやポテンシャル場の形成が成されているかは明らかでない. そこで本研究では,内部イメージング技術に基づき人の皮膚や軟骨などの軟組織の変形を計測し,力学モデリングを通して人の巧みな操作における軟組織の力学を解明する.
本研究は,
- 人の把持と物体操作における手指の内部変形の計測
- 軟組織の力学モデリングと変形特性の同定
- 柔軟指操作の三次元力学モデリング
- 人の把持や操作のダイナミックシミュレーション
- 人の巧みな操作における力学的な源泉の解明
という課題から成る.手指の内部変形を可能にするMRIの条件を明確にし,軟組織の変形特性に加えて柔軟指と物体との接触に代表される境界条件のモデリング手法を確立する.三次元空間内で人が実行する把持や操作の軟組織を考慮したダイナミックシミュレーションを可能にするとともに,ダイナミックシミュレーションを通してポテンシャルエネルギーの形成や指先における圧力分布を評価し,巧みさにおける軟組織の力学を明らかにし,軟組織のポテンシャルエネルギー等が人の巧みな操作における力学的な源泉であることを示すことを試みる.
(提案書 全文)
報告書
著書
著書(章)
論文
- Zhongkui Wang, Kazuki Namima, and Shinichi Hirai,
Physical Parameter Identification of Uniform Rheological Deformation Based on FE Simulation,
生体医工学, Vol.47, No.1, pp.1-6, 2009
- Tokuda J, Morikawa S, Haque HA, Tsukamoto T, Matsumiya K, Liao H, Masamune K, Dohi T.,
Adaptive 4D MR Imaging for MRI-guided Therapy Using Navigator-Based Respiratory Signal,
Magnetic Resonance in Medicine, Vol.59, pp.1051-1061, 2008
- Murakami K, Morikawa S, Naka S, Demura K, Sato K, Shiomi H, Kurumi Y, Inubushi T, Tani T.,
Correlation between High Field MR Images and Histopathological Findings of Rat Transplanted Cancer Immediately after Partial Microwave Coagulation,
Magnetic Resonance in Medical Science, Vol.7, pp.105-112, 2008
国際会議
- Van Ho Anh, Viet Dzung Dao, Susumu Sugiyama, and Shinichi Hirai
Force/Moment Sensing During Sliding Motion using a Micro Sensor Embedded in a Soft Fingertip,
Proc. 10th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV 2008), Dec. 17-20, Hanoi, Vietnam, 2008
- Takahiro Inoue and Shinichi Hirai,
Task-selection Control by Thumb and Forefinger Based on Softfinger Contact,
Third Asia International Symposium on Mechatronics (AISM2008), Sapporo, August 27-31, 2008
- Satoshi Yamaguchi, Shigehiro Morikawa, Yoshiaki Shirai, and Hiromi T. Tanaka,
Modeling of Needle Insertion for Percutaneus Minimally Invasive Therapy,
CARS 2008 (Computer Assisted Radiology and Surgery), Barcelona, Spain, 6/25-28, 2008
口頭発表
- 平井 慎一, 井上 貴浩,
柔軟指による三次元把持と操作,
第26回日本ロボット学会学術講演会予稿集CD-ROM, 神戸, Sept., 2008
- 浪間 一希, 王 忠奎, 平井 慎一,
アクティブ虚血ダイナミクスのシミュレーション,
生体医工学シンポジウム2008 (BMES2008), Toyonaka, Sept., 2008
- 辻野 圭則, 中川 智史, 山口 哲, 田中 弘美,
適応的四面体ボリュームメッシュのオンラインリメッシュ法を用いた剥離シミュレーション,
第13回日本バーチャルリアリティ学会, 奈良, 9/24-26, 2008
 |
 |
 |
 |
 |
| |
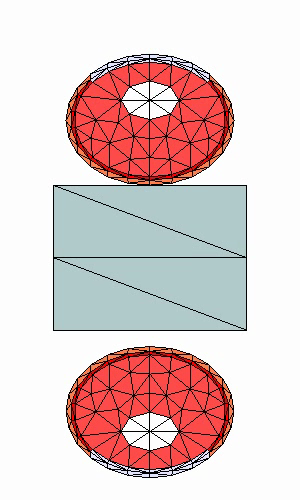
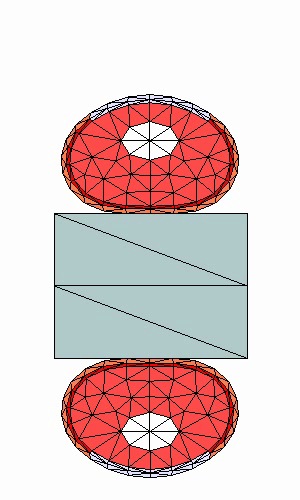
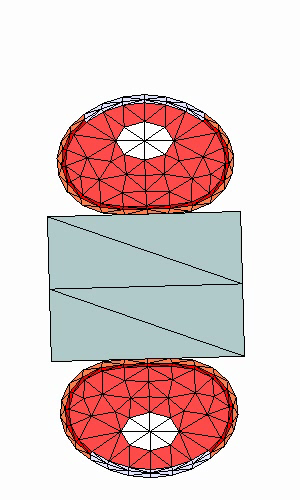
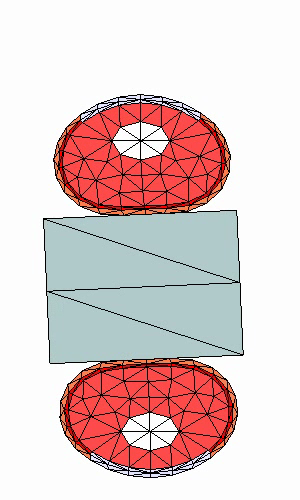
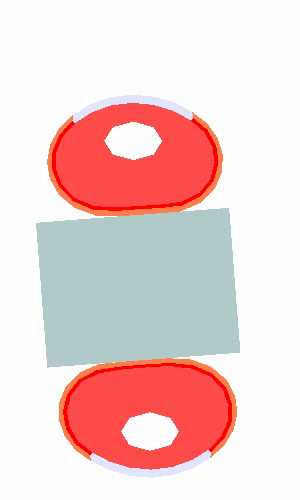
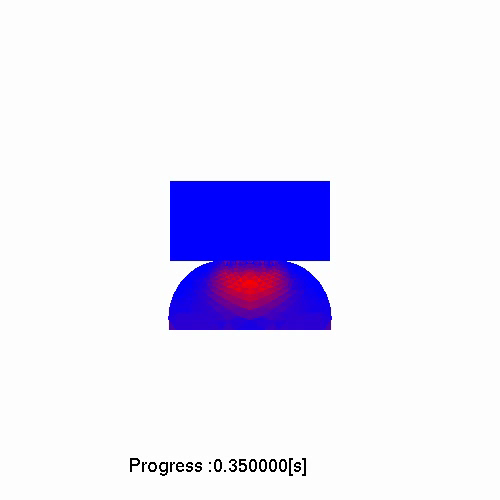
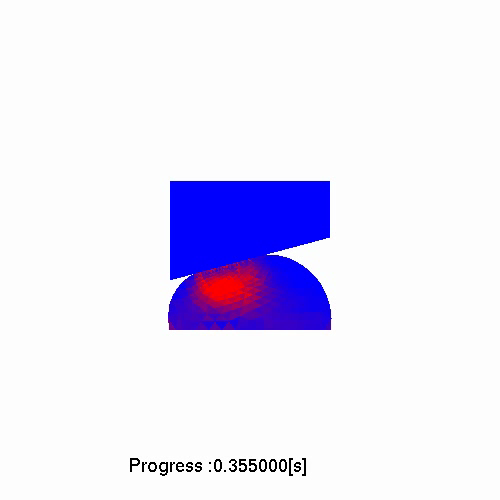
| 柔軟指による物体把持と回転操作のシミュレーション
(動画) |
|
|
|
| |
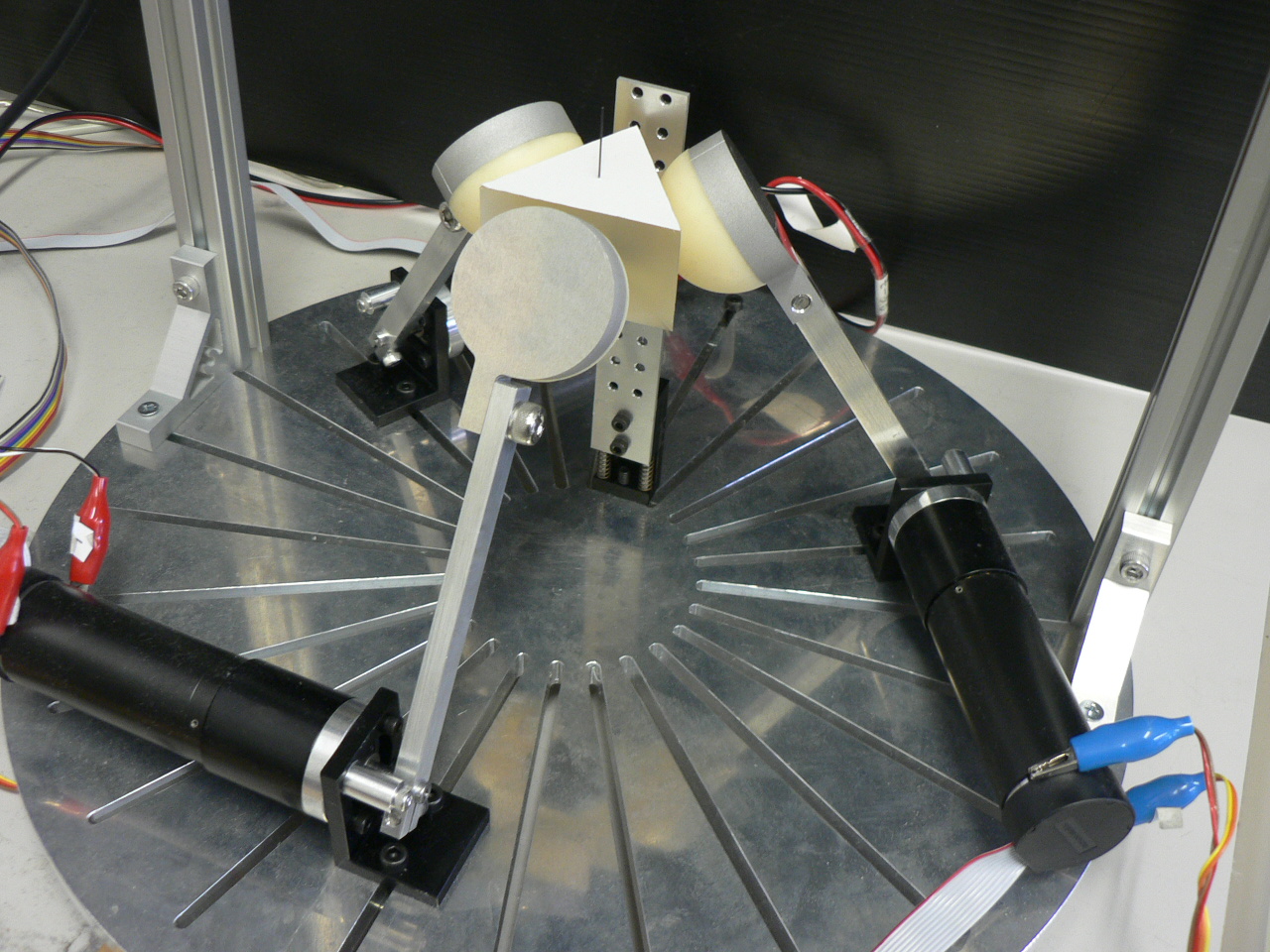
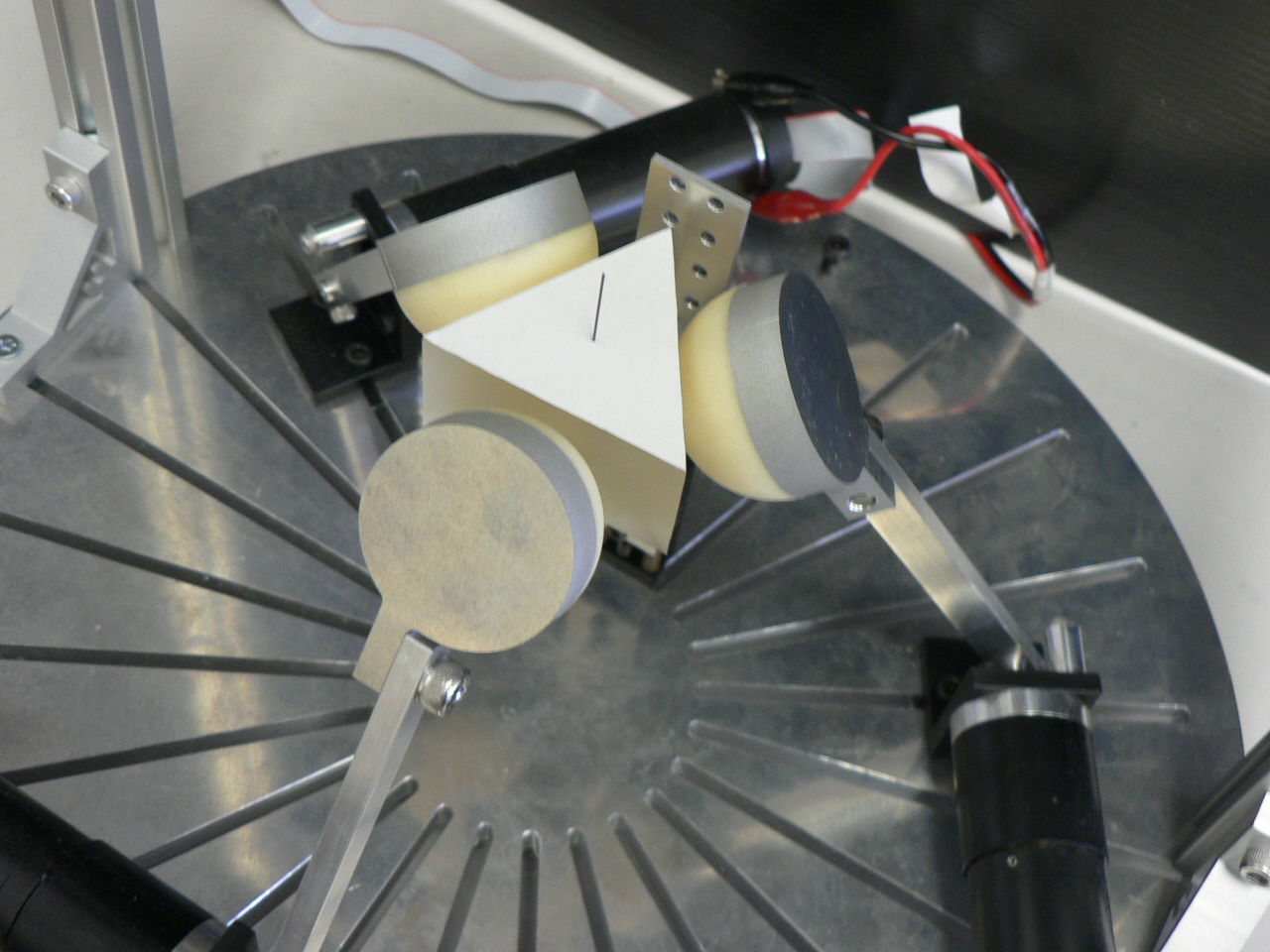
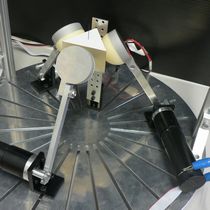
| 柔軟指による把持と操作 |
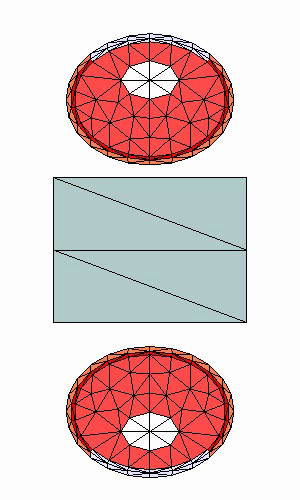
柔軟指と物体の接触における歪みの計算 |
|
|
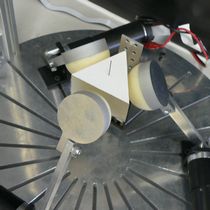
| |
| 3本の1自由度柔軟指による物体把持 |