Heads: Shinichi Hirai
Contact: Yuusuke Takagaki
Date: 2008 - 2013
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
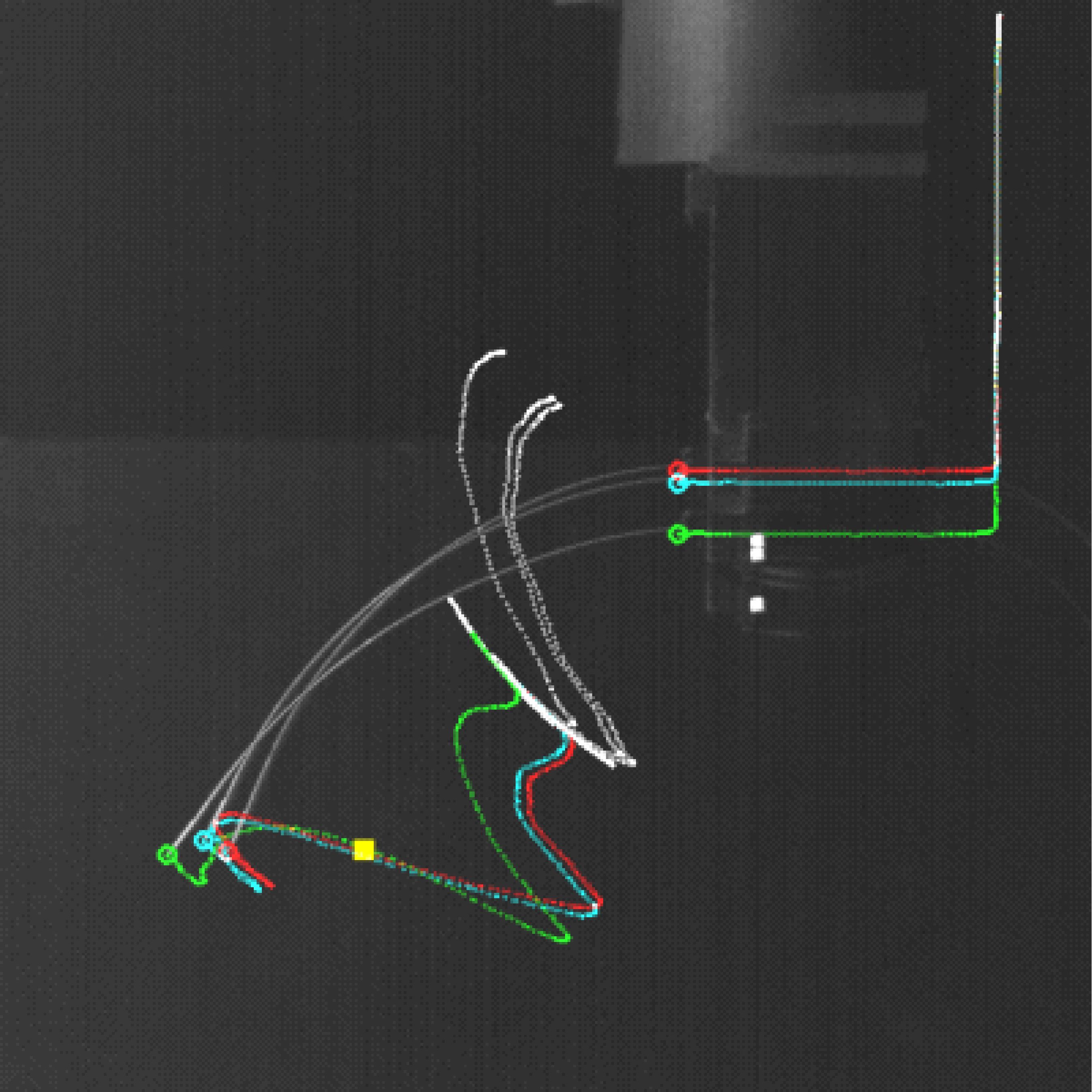
Tateisi Science and Technology Foundation "Manipulation of Belt Objects"
Associated lab/group: