Heads: Shinichi Hirai
Contact: Takahiro Wada
Date: 1995 - 1999
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
Kawamura Lab.
|
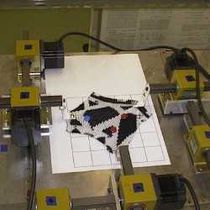
Cloth Positioning
Heads: Shinichi Hirai Date: 1995 - 1999
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
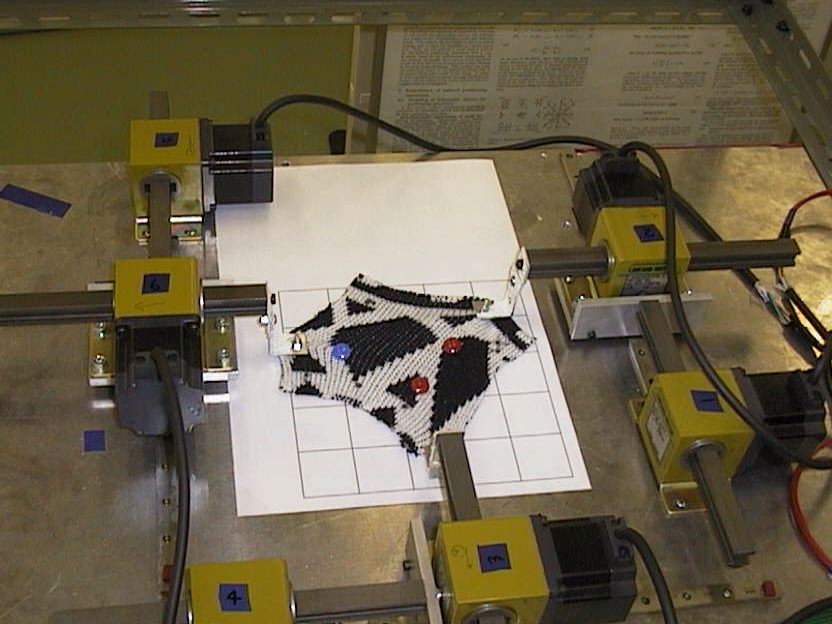
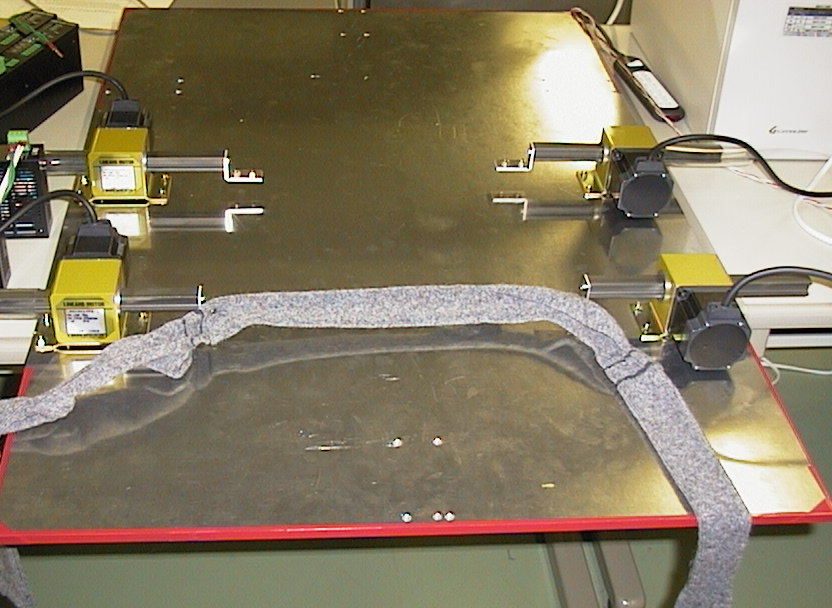
The goal of this project is to derive operation strategy and control law for the positioning of multiple points on an extensible cloth. Distributed manipulation system is developed for this positioning and a novel control law for the positioning is derived based on a coarse model of a cloth.
Many operations in garment industry require the guidance of multiple points on a fabric. Moreover, the points cannot be manipulated directly and the guidance must be performed by controlling the location of points except the positioned points. Namely, the guidance has the following difficulties:
Control System for Indirect Simultaneous Positioning
| Personnel |
| Name | Title | Degree | |
| Takahiro Wada | Graduated | Ph.D | |
| Hiroshige Mori | Graduated | Master of Eng. |
| Publications |
| Notes |
|
|
|
|
|
| Related Sites |