Heads: 平井 慎一
Contact: 和田 隆広
Date: 1995 - 1999
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
川村研究室
|
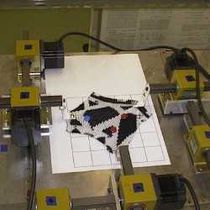
布地位置決め
Heads: 平井 慎一 Date: 1995 - 1999
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
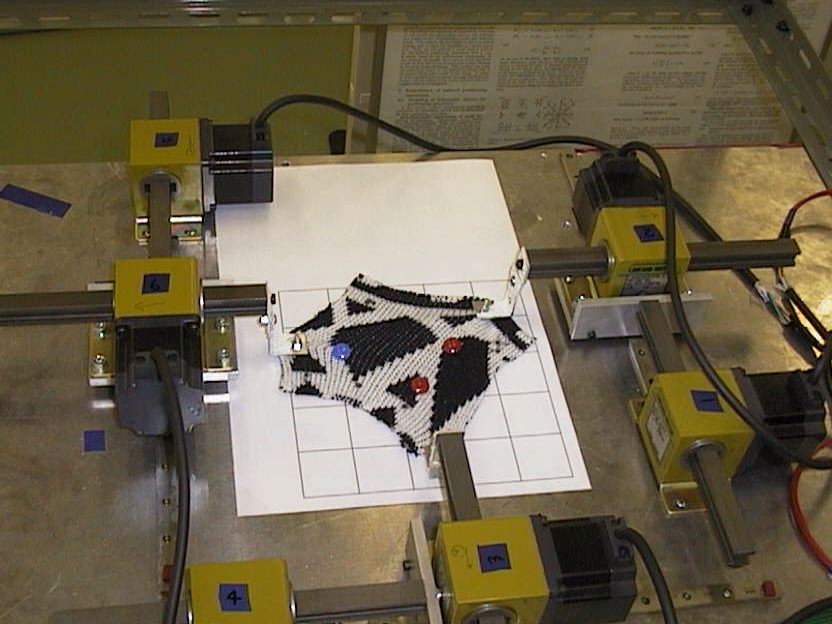
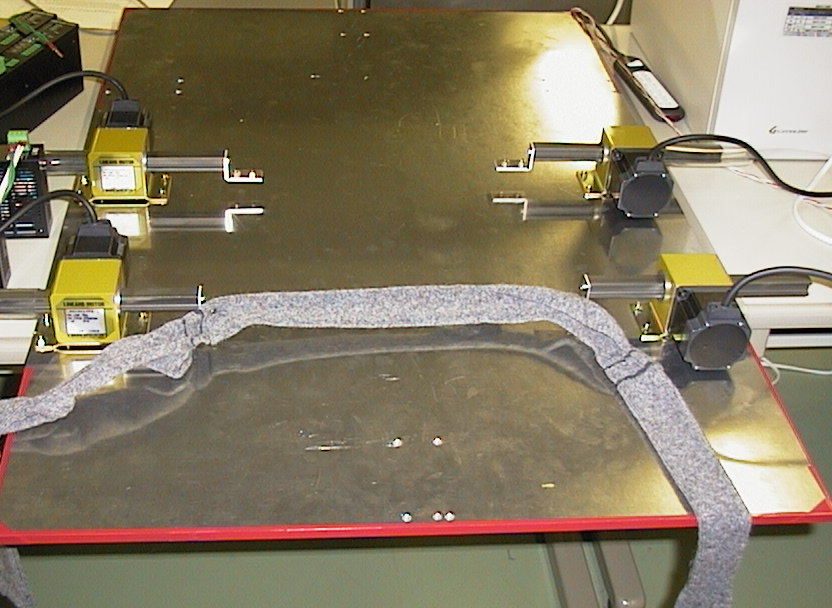
本研究の目的は,布地上の複数の点を位置決めする作業における作業方策ならびに制御則を導くことである.このような作業を,複数の操作点を持つ分布型アクチュエーションシステムにより実現する.
現在の生産現場において,人手に頼ることが多い作業の一つに,布地のハンドリングがあげられる.たとえば,靴下の縫製においては,布地の複数の編み目の位置を合わせ,合わせた編み目を縫うという作業がある.この作業は人手を要する作業であり,自動化が望まれている.本研究の目的は,布地上の複数の点を位置決めする作業における作業方策ならびに制御則を導くことである.布地の位置決め作業は,
間接同時位置決めの制御系
| 担当 |
| 名前 | 学年 | 学位 | |
| 和田 隆広 | Graduated | 工学博士 | |
| 森 宏滋 | Graduated | 工学修士 |
| 研究発表 |
| 参考資料 |
|
|
|
|
|
| 関連サイト |