 |
レオロジー物体成形制御
Heads: 平井 慎一
Contact: 徳本 真一
Date: 1997 - 2001
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
Jump to:
研究内容 |
担当 |
研究発表 |
参考資料 |
関連サイト
本研究の目的は,生地,ペースト,ゼリーに代表されるレオロジー物体の成形を機械システムで実現することである.レオロジー物体の成形を自動化するために,レオロジー物体成形機械とビジョンを用いる成形制御則を開発する.
食品産業において,人手に頼ることが多い作業の一つに,生地,ペースト,ゼリーなど,レオロジー的変形特性を示す物体の成形作業があげられる.生地等の成形では,物体に大きな変形を生じる上に,力学的特性が変化しやすく,機械システムによる自動化は困難であるのが現状である.一方,コスト面や衛生面から,成形作業の自動化に対するニーズは強い.そこで,本研究では,レオロジー物体 (rheological objects) の成形作業を機械システムで実現することを目的とする.
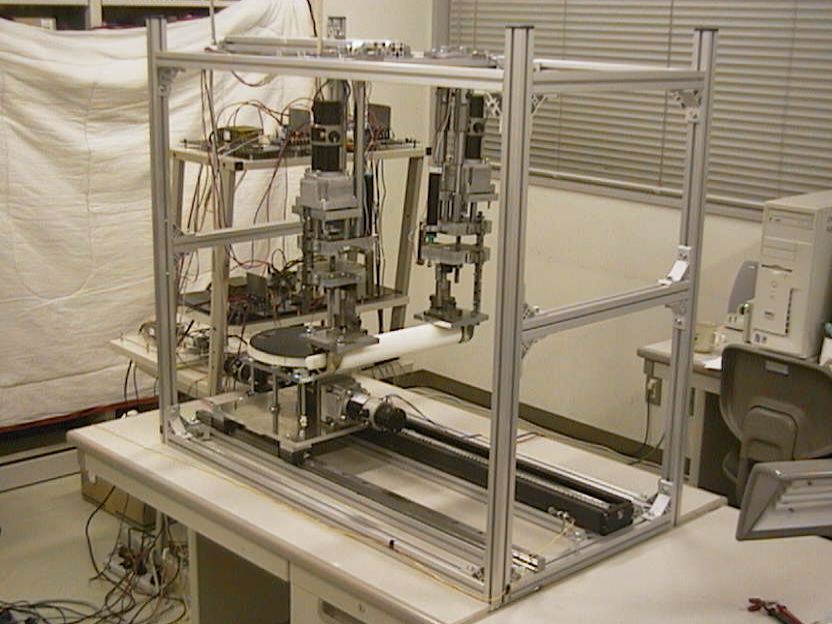
本プロジェクトでは,多自由度を有する成形機械を構築するととも,ビジョンフィードバックを用いる成形制御則を開発した.開発システムは,
- 初期形状のばらつきに対処し,レオロジー物体を目標形状に成形することができる.
- 成形過程における変形特性の変化に対応することができる.
という特徴を有する.
|
|
|
→ |
 |
弾性物体 (elastic object) |
 |
→ |
 |
→ |
 |
レオロジー物体 (rheological object) |
| 自然形状 |
|
変形形状 |
→ |
 |
塑性物体 (plastic object) |
|
名前 |
学年 |
学位 |
|
斎藤 拓哉 |
Graduated |
工学修士 |
|
藤田 欣晃 |
Graduated |
工学修士 |
論文
- 徳本 真一, 平井 慎一,
成形過程モデルを用いたレオロジー物体の成形制御,
日本ロボット学会誌, Vol.20, No.7, pp.717-724, 10.7210/jrsj.20.717, Oct., 2002
- 徳本 真一, 平井 慎一,
形状制御のためのレオロジー物体の変形推移グラフ,
日本ロボット学会誌, Vol.19, No.3, pp.387-394, 10.7210/jrsj.19.387, Apr., 2001
- 徳本 真一, 平井 慎一,
形状制御のためのレオロジー物体の変形モデリング,
日本ロボット学会誌, Vol.18, No.8, pp.1141-1148, 10.7210/jrsj.18.1141, Nov., 2000
国際会議
- Shinichi Tokumoto and Shinichi Hirai,
Deformation Control of Rheological Food Dough Using a Forming Process Model,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.2, pp.1457-1464, 10.1109/ROBOT.2002.1014749, Washington D.C., U.S.A., May 11-15, 2002
- Shinichi Tokumoto, Takuya Saito, and Shinichi Hirai,
Vision-based Automatic Forming of Rheological Objects Using Deformation Transition Graphs,
Proc. IEEE Int.Conf. on Robotics and Automation, Vol.1, pp.812-817, 10.1109/ROBOT.2001.932650, Seoul, Korea, May 21-26, 2001 Finalist of 2001 IEEE Int. Conf. Robotics and Automation Kayamori Best Paper Award
- Shinichi Tokumoto, Yoshiaki Fujita, and Shinichi Hirai,
Deformation Transition Graphs in Forming Operations of Rheologic Objects,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.4, pp.3071-3076, 10.1109/ROBOT.2000.845135, San Francisco, CA, U.S.A., Apr. 24-28, 2000
口頭発表
- 徳本 真一, 藤田 欣晃, 平井 慎一,
成形制御のためのレオロジー物体の変形推移グラフ,
ロボティクスシンポジア予稿集, pp.176-181, シーパル須磨, Mar. 26-27, 2000
- 徳本 真一, 齋藤 拓哉, 平井 慎一,
変形推移グラフを用いたレオロジー物体の成形,
ロボティクス・メカトロニクス'00講演会予稿集CD-ROM, 熊本, May 11-13, 2000
- 徳本 真一, 齋藤 拓哉, 平井 慎一,
変形推移グラフを用いたレオロジー物体の成形に関する研究,
2000国際食品工業展アカデミックプラザ, pp.122-127, 2000
- 齋藤 拓哉, 徳本 真一, 平井 慎一,
レオロジー物体伸長成形のための成形機械システム,
第18回日本ロボット学会学術講演会予稿集, pp.133-134, 2000
- 徳本 真一, 齋藤 拓哉, 平井 慎一,
レオロジー物体の変形実験による変形推移グラフの生成,
第18回日本ロボット学会学術講演会予稿集, pp.135-136, 2000
- 徳本 真一, 藤田 欣晃, 平井 慎一,
形状制御のための粘弾性物体の変形モデリング,
ロボティクスシンポジア予稿集, pp.224-229, ホテルニュー水戸屋, Mar. 30-31, 1999
- 徳本 真一, 藤田 欣晃, 平井 慎一,
格子モデルを用いた粘弾性物体のモデリングとその成形作業過程の解析,
ロボティクス・メカトロニクス'99講演会予稿集CD-ROM, 東京工業大学, June 11-13, 1999
- 藤田 欣晃, 徳本 真一, 平井 慎一,
レオロジー物体の変形形状推移グラフ,
第17回日本ロボット学会学術講演会予稿集, pp.77-78, 1999
- 平井 慎一, 徳本 真一, 藤田 欣晃,
レオロジー物体の形状変形モデリング,
日本機械学会 第9回設計工学・システム部門講演会予稿集, pp.251-254, 1999
- 徳本 真一, 藤田 欣晃, 平井 慎一,
形状制御のための粘弾性物体の変形モデリング,
第16回日本ロボット学会学術講演会予稿集, pp.1545-1546, 1998