Heads: 平井 慎一
Contact: Muhammad Hisyam B Rosle
Date: 2012 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
科学研究費補助金 (No.15H02230) 2015 - 2017 (平井 慎一)
触知覚センシングにおける軟組織のダイナミクス・トライボロジー
Associated lab/group:
|
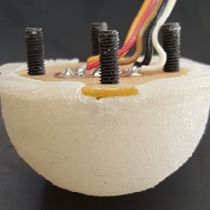
柔軟指先センサ
Heads: 平井 慎一 Date: 2012 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究では,ホール素子と永久磁石を用いて,ロボットハンドの柔らかい指先に埋め込むことができる,小型の力覚センサを構築する.
| 担当 |
| 名前 | 学年 | 学位 | |
| Or Keung | Graduated | 工学博士 | |
| 中野 秀基 | Graduated | 工学修士 | |
| 野村 厚弥 | Graduated | 工学修士 | |
| 山田 幸翼 | Graduated | ||
| 高嶋 拓 | Graduated |
| 研究発表 |
| 参考資料 |
| 関連サイト |