Heads: 平井 慎一
Contact: 王 忠奎
Date: 2012 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
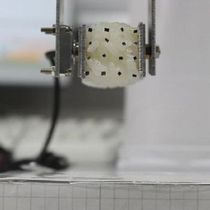
食品ハンドリング
Heads: 平井 慎一 Date: 2012 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究の目的は,ロボットによる食品の自動ハンドリングを実現することである.食品のハンドリングにおいては,精度を要求しない代わりに,形状や位置のバラツキに対応する必要がある.ケージングを基礎として,バラツキに対応できるロボットハンドを設計し,食品の自動ハンドリングを実現する.
| 2018/12/13 | 日刊電波新聞の記事「食品材料をハンドリング」でソフトグリッパーが紹介されました. |
| 2018/12/12 | 京都新聞(夕刊)の科学スコープ「人に優しい柔軟ロボ」でソフトグリッパーが紹介されました. |
| 2018/11/26 | 日本経済新聞の記事「弁当に総菜詰めるロボ」でソフトグリッパーが紹介されました. |
| 2018/8/3 | 王助教が,A Soft Gripper with Adjustable Stiffness and Variable Working Length for Handling Food Materialで,IEEE RCAR 2018のBest Paper Award on Roboticsを受賞しました. |

|
|
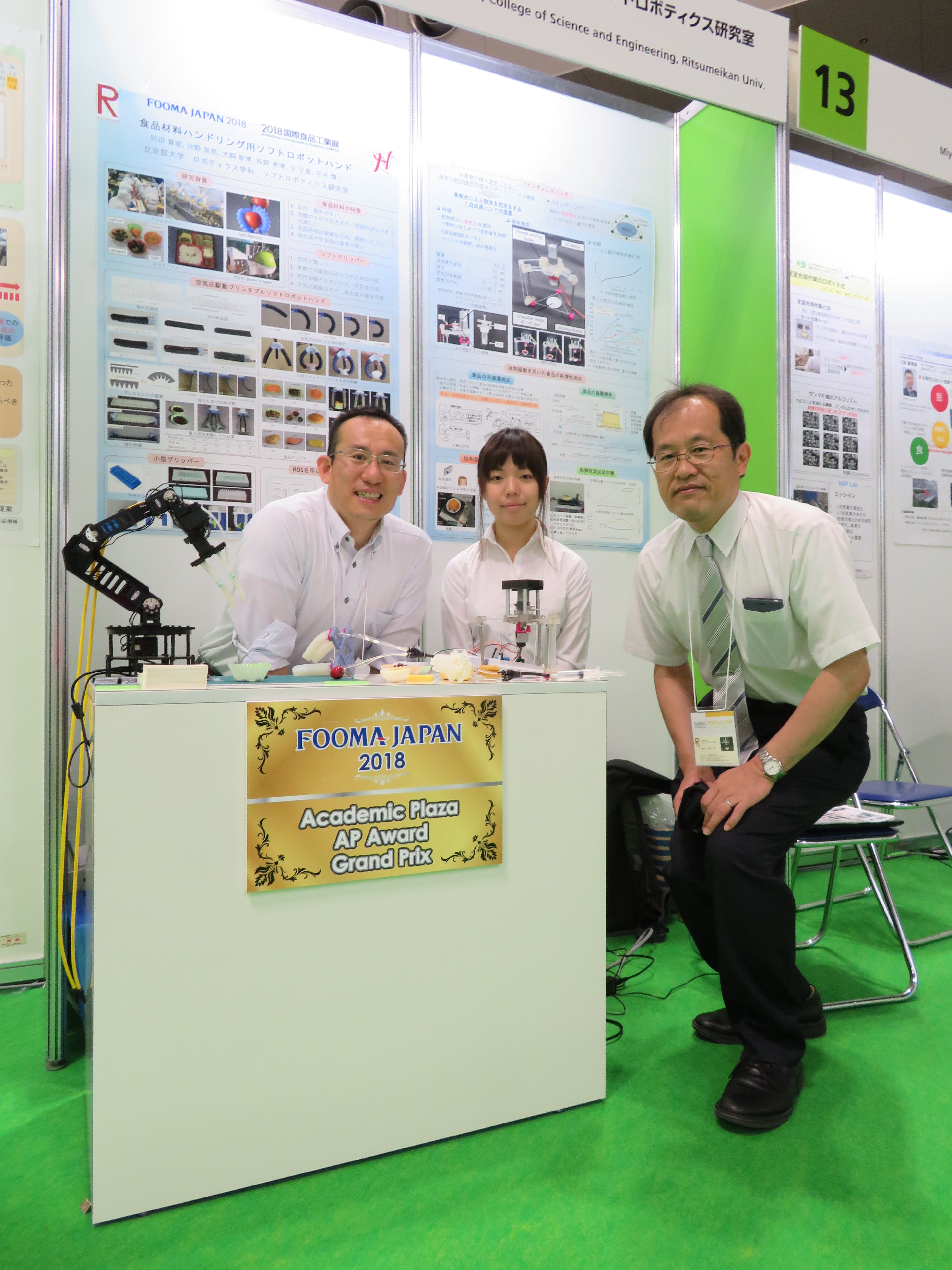
| 2018/6/14 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. |





|
|
| 2017/12/8 | ソフトロボティクス研究専門委員会 (SIG SoRo Japan) 第3回研究会 |
| 2017/6/15 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. (大学ウェブページ) |




|
|
| 2017/6/13-6/16 | 国際食品工業展アカデミックプラザで,食品材料ハンドリング用ソフトロボットハンドを展示 |
| 2017/4/30 | 朝日新聞「科学の扉 ロボット ソフトに進化」でソフトロボティクスに関する研究が紹介されました. |
| 2016/6/9 | 国際食品工業展アカデミックプラザでFOOMA AP(アカデミックプラザ)賞を受賞しました. |
| 2014/6/12 | 国際食品工業展アカデミックプラザでFOOMA AP(アカデミックプラザ)賞を受賞しました.(pick up) |



|
|
| 2014/6/10-13 | FOOMA 2014アカデミックプラザで 「軽量ロボットシステムによる食品材料のハンドリング」を発表 |
| 2013/6/11-14 | FOOMA 2013アカデミックプラザで 「ロボットシステムによるレオロジー食品材料のハンドリング」を発表 |
| 担当 |
| 名前 | 学年 | 学位 | |
| 土橋 裕史 | Graduated | 工学修士 | |
| 西田 賢生 | Graduated | 工学修士 | |
| Yun Taesoo | Graduated | 工学修士 | |
| 鐘江 崚 | Graduated | 工学修士 | |
| 栗山 佳之 | Graduated | 工学修士 | |
| 犬飼 智博 | Graduated | 工学修士 | |
| 沖野 友亮 | Graduated | 工学修士 | |
| 岩政 恒史 | Graduated | 工学修士 | |
| 谷口 祐介 | Graduated | 工学修士 | |
| 花田 吾郎 | Graduated | ||
| 山口 紘明 | Graduated | ||
| 神田 名緒 | Graduated |
| 研究発表 |
| 参考資料 |
| 関連サイト |