 |
力制御の設計と学習
Heads: 平井 慎一
Contact: 平井 慎一
Date: 1992 - 1995
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
Jump to:
研究内容 |
担当 |
研究発表 |
参考資料 |
関連サイト
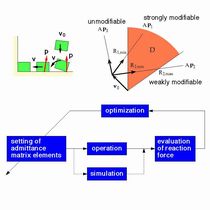
本研究の目的は,組立作業に適合する適切な力制御パラメータを決定する手法を確立することである.特に,ダンピング制御則を対象とし,アドミタンス行列と指令径路を,設計する手法を確立する.
組立や把握など対象物との接触を伴う作業,いわゆるマニピュレーション作業を行なうためには,力制御の技術が有効である.力制御技術を適用したとき,マニピュレータの挙動は,力制御パラメータに強く影響されるので,これらを適切に定めることが重要である.本研究の目的は,与えられたマニピュレーション作業に適合する適切な力制御パラメータを,決定する手法を確立することである.特に,組立作業に有効な制御則として提案されている,ダンピング制御則を対象とし,その制御パラメータであるアドミタンス行列と指令径路を,設計する手法を確立することを目指す.力制御則には,解析的に設計できない,あるいは困難な部分も多い.そこで,実環境における試行を通して,制御パラメータを学習する手法を,あわせて確立する.
論文
国際会議
- Shinichi Hirai, Takashi Inatsugi, and Kazuaki Iwata,
Learning of Admittance Matrix Elements for Manipulative Operations,
Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.2, pp.763-768, 10.1109/IROS.1996.571048, Osaka, Japan, Nov. 4-8, 1996
- Shinichi Hirai and Kazuaki Iwata,
Planning of Control and Sensing Strategies for Manipulation,
Proc. 2nd Int. Symp. on Measurement and Control in Robotics, pp.567-572, Tsukuba, Japan, Nov., 1992
- Shinichi Hirai and Kazuaki Iwata,
A Model-based Generation of Damping Control Law for Part-mating,
Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.1, pp.494-499, 10.1109/IROS.1992.587380, Raleigh, NC, U.S.A., July 7-10, 1992
- Shinichi Hirai and Kazuaki Iwata,
Recognition of Contact State Based on Geometric Model,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.2, pp.1507-1512, 10.1109/ROBOT.1992.220038, Nice, France, May 12-14, 1992
- Shinichi Hirai and Haruhiko Asada,
A Model-Based Approach to the Recognition of Assembly Process States Using the Theory of Polyhedral Convex Cones,
Proc. 3rd Japan-U.S.A. Symp. on Flexible Automation, pp.809-816, Kyoto, Japan, July, 1990
- Haruhiko Asada and Shinichi Hirai,
Towards a Symbolic-Level Force Feedback: Recognition of Assembly Process States,
5-th Int. Symp. on Robotics Research, pp.341-346, Tokyo, Japan, Aug. 28-31, 1989
口頭発表
- 宋 在晟, 平井 慎一, 小野里 雅彦, 岩田 一明,
組立作業のための受動的コンプライアンスの設計手法,
第14回日本ロボット学会学術講演会予稿集, pp.627-628, 1996
- 宋 在晟, 平井 慎一, 岩田 一明,
組立コンプライアンスの設計のための接触作用のモデリング,
1996年度精密工学会秋期大会学術講演会予稿集, pp.371-372, 1996
- 平井 慎一,
力の安定性を考慮したアドミタンス行列要素の学習,
ロボティクス・メカトロニクス'96講演会予稿集, pp.859-860, 山口理科大学, June 20-21, 1996
- 平井 慎一, 稲次 崇, 岩田 一明,
マニピュレーション作業のためのアドミタンス行列要素の学習,
第13回日本ロボット学会学術講演会予稿集, pp.523-524, 1995
- 平井 慎一, 岩田 一明,
安定性を考慮した組立作業のためのアドミタンス行列の設定,
ロボティクス・メカトロニクス'94講演会予稿集, pp.679-680, 兵庫県民会館, June 30 - July 1, 1994
- 宋 在晟, 平井 慎一, 岩田 一明,
作業面に基づく組立機械の機構学的設計,
1994年度精密工学会春期大会学術講演会予稿集, pp.961-962, 1994
- 平井 慎一, 岩田 一明,
幾何モデルをもとにしたダンピング制御パラメータの導出,
第10回日本ロボット学会学術講演会予稿集, pp.635-636, 1992
- 平井 慎一, 岩田 一明,
組付作業における幾何モデルベース・コンプライアンス行列の導出,
第9回日本ロボット学会学術講演会予稿集, pp.49-50, 1991
- 平井 慎一, 岩田 一明,
幾何モデルをもとにした力情報の解釈,
ロボティクス・メカトロニクス'91講演会予稿集, pp.163-166, 名古屋国際会議場, June 7-8, 1991
- 平井 慎一, 岩田 一明,
力・位置信号による組立作業状態のモデルをもとにした識別,
第8回日本ロボット学会学術講演会予稿集, pp.99-102, 1990
- 平井 慎一, 岩田 一明,
接触状態グラフを用いた組立過程の解析,
1990年度精密工学会秋期大会学術講演会予稿集, pp.1263-1264, 1990
- 平井 慎一, 出海 晴生, 浅田 春比古, 得丸 英勝,
不確定環境下における適応的なマニピュレーションのためのコンプライアンスの計画,
第27回計測自動制御学会学術講演会予稿集, pp.635-636, 1988