Heads: Shinichi Hirai
Contact: Tatsuhiko Tsuboi
Date: 1997 - 2000
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
Impulsive Sorter
Heads: Shinichi Hirai Date: 1997 - 2000
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
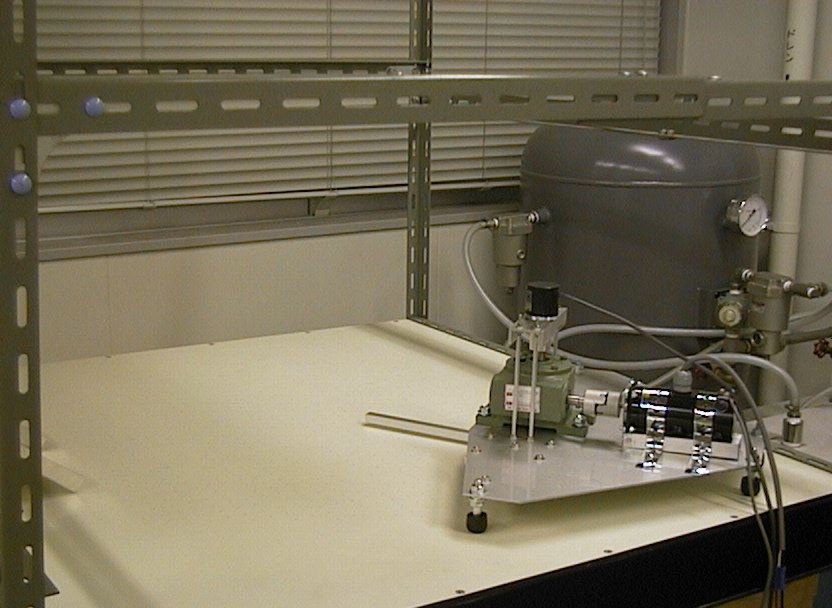
The goal of this project is to develop a impulsive sorter, which enables fast object sorting with high flexibility. Air floating and sorting using collision enable fast sorting and vision-guided sorting provides high flexibility.
The goal of this project to develop a fast sorting device with high flexibility. Traditional conveyers and feeders can perform fast conveyance and sorting of objects but are short of flexibility. On the other hand, handling robots has high flexibility while cannot perform fast operations. In this project, we will develop an impulsive sorter to perform fast operations with high flexibility. The impulsive sorter has the following properties:
| Personnel |
| Name | Title | Degree | |
| Masaaki Niwa | Graduated | Master of Eng. |
| Publications |
| Notes |
|
|
|
| Related Sites |