Heads: 平井 慎一
Contact: 坪井 辰彦
Date: 1997 - 2000
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
インパルスソータ
Heads: 平井 慎一 Date: 1997 - 2000
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
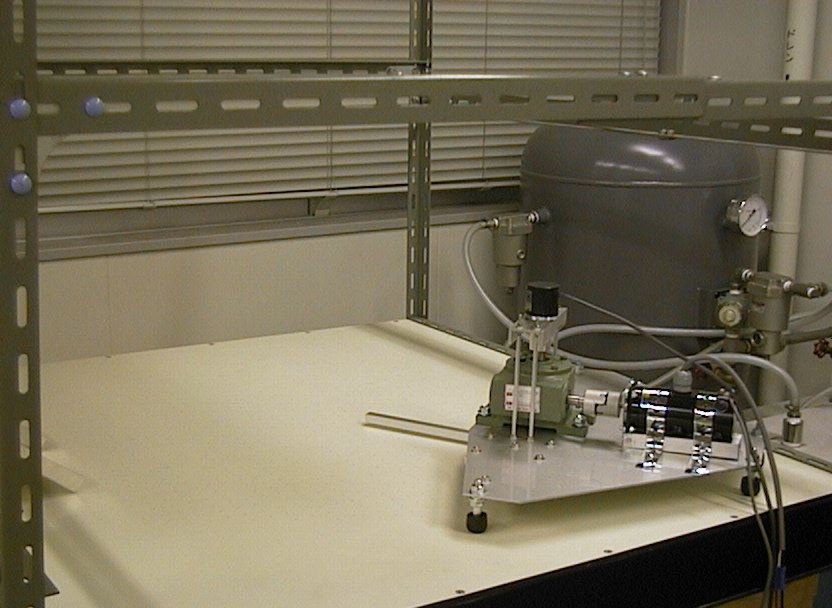
本研究では,高速な搬送が可能で,柔軟性を有する新しい搬送機器として,インパルスソータを開発する.衝突と空気圧浮上を利用してソーティングを実現するメカニズムを開発し,その制御則を構築する.
物体の搬送は,生産における基盤技術の一つである.コンベヤやパーツフィーダなど従来の搬送機器は,高速な搬送が可能である一方,柔軟性に欠け,搬送物体の変更に素早く対処することができない.ハンドリングロボットは,柔軟性は高いが,一般に搬送スピードが十分ではない.本研究では,高速な搬送が可能で,柔軟性を有する新しい搬送機器として,インパルスソータ (impulsive sorter)を開発する.インパルスソータとは,衝突と空気圧浮上を利用して,物体の仕分を行う装置である.本プロジェクトでは,インパルスソータのメカニズムと制御則を研究する.
| 担当 |
| 名前 | 学年 | 学位 | |
| 丹羽 政晶 | Graduated | 工学修士 |
| 研究発表 |
| 参考資料 |
|
|
|
| 関連サイト |