Jump to:
研究内容 |
担当 |
研究発表 |
参考資料 |
関連サイト
本研究の目的は,VR空間内にレオロジー物体を構築し,レオロジー物体を触るときに生じる感覚を実現することである.レオロジー物体のリアリティベースモデリング,CTと超音波画像によるレオロジー物体の内部変形センシング,レオロジー変形のハプティック提示に関する研究を進める.
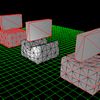
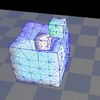
人間の生活環境には,レオロジー特性を示す柔軟物が数多く存在する.VR空間を構築するためには,このようなレオロジー物体を仮想環境内に構築する必要がある.そこで,本プロジェクトでは,VR空間内に仮想レオロジー物体 (Virtual Rheological Objects) を構築し,レオロジー物体を触るときに生じる感覚を実現することを目指す.
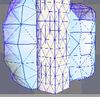
研究テーマは,1) レオロジー物体のリアリティベースモデリング,2) MRI,CTと超音波画像によるレオロジー物体の内部変形センシング,3) レオロジー変形のハプティック提示である.
|
|
|
→ |
 |
弾性物体 (elastic object) |
 |
→ |
 |
→ |
 |
レオロジー物体 (rheological object) |
| 自然形状 |
|
変形形状 |
→ |
 |
塑性物体 (plastic object) |
論文
- 友國 誠至, 平井 慎一,
FPGAによる仮想レオロジー物体のリアルタイム変形シミュレーション,
日本バーチャルリアリティ学会論文誌, Vol.10, No.3, pp.443-452, 10.18974/tvrsj.10.3_443, Sept., 2005
- 友國 誠至, 杉山 勇太, 平井 慎一,
実時間計算可能な仮想レオロジー物体の構築,
日本バーチャルリアリティ学会論文誌, Vol.8, No.3, 特集 変形と力覚, pp.247-254, 10.18974/tvrsj.8.3_247, Sept., 2003
- 植田 直樹, 櫛浜 斎延, 平井 慎一, 田中 弘美,
ハプティックビジョンに基づく能動的レオロジー物体モデリングのための粘弾性パラメータ抽出,
日本バーチャルリアリティ学会論文誌, Vol.8, No.3, 特集 変形と力覚, pp.237-246, 10.18974/tvrsj.8.3_237, Sept., 2003
国際会議
- Naoki Ueda, Shinichi Hirai, and Hiromi T.Tanaka,
Extracting Rheological Properties of Deformable Objects with Haptic Vision,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.4, pp.3902-3907, 10.1109/ROBOT.2004.1308876, New Orleans, LA, U.S.A., Apr. 26 - May 1, 2004
- Ryo Nogami, Hiroshi Noborio, Seiji Tomokuni, and Shinichi Hirai,
A Comparative Study of Rheology MSD Models whose Structures are Lattice and Truss,
Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.4, pp.3809-3616, 10.1109/IROS.2004.1390008, Sendai, Japan, Sept. 28 - Oct. 2, 2004
- Masafumi Kimura, Yuuta Sugiyama, Seiji Tomokuni, and Shinichi Hirai,
Constructing Rheologically Deformable Virtual Objects,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.3, pp.3737-3743, 10.1109/ROBOT.2003.1242170, Taipei, Sept. 14-19, 2003
- Naoki Ueda, Kiyotaka Kushihama, Shinichi Hirai, Hiromi T. Tanaka,
Extracting Rheological Properties of Deformable Objects with Haptic Vision,
Proc. 13th Int. Conf. on Artificial Reality and Telexistence (ICAT 2003), Tokyo, Japan, Dec., 2003
- Shinichi Tokumoto, Shinichi Hirai, and Hiromi Tanaka,
Constructing Virtual Rheological Objects,
Proc. World Multiconference on Systemics, Cybernetics and Infomatics, pp.106-111, Orlando, FL, U.S.A., July 22-25, 2001
- Shinichi Tokumoto, Yoshiaki Fujita, and Shinichi Hirai,
Deformation Modeling of Viscoelastic Objects for Their Shape Control,
Proc. IEEE Int. Conf. on Robotics and Automation, Vol.1, pp.767-772, 10.1109/ROBOT.1999.770067, Detroit, MI, U.S.A., May 10-15, 1999
解説
- 平井 慎一,
仮想レオロジー物体のリアルタイム変形シミュレーション,
日本計算工学会誌「計算工学」, Vol.13, No.3, pp.1865-1868, July, 2008
- 平井 慎一,
レオロジー物体の動的変形シミュレーションと力学特性の同定,
日本食品機械工業会「ふーま」, Vol.92, pp.26-29, 2007
- 平井 慎一,
レオロジー物体の動的変形シミュレーション,
日本食品機械工業会「ふーま」, Vol.79, 2003
口頭発表
- Zhongkui Wang and Shinichi Hirai,
Modeling of Rheological Object with Square or Cubic Finite Element,
7th Joint Workshop on Machine Perception and Robotics (MPR2011), Beijing, China, Oct. 13-14, 2011
- Zhongkui Wang and Shinichi Hirai,
Finite Element Modeling of Rheological Objects for Simultaneously Reproducing their Deformation and Force Behaviors,
6th Joint Workshop on Machine Perception and Robotics (MPR2010), Fukuoka, Japan, Oct. 8-9, 2010
- Zhongkui Wang and Shinichi Hirai,
Parameter Estimation of Rheological Object Based on FE Simulation and Nonlinear Optimization,
5th Joint Workshop on Machine Perception and Robotics (MPR2009), Kyoto, Japan, Oct. 4-5, 2009
- Zhongkui Wang and Shinichi Hirai,
Physical Parameter Identification of Uniform Rheological Deformation through FE Model Simulation,
Robotics and Mechatronics Conference 2008, Nagano, Japan, June 5-7, 2008
- Zhongkui Wang, Kazuki Namima, Shinichi Hirai,
Physical Parameter Identification of Isotropic Uniform Deformation Based on FE Simulation,
生体医工学シンポジウム2008 (BMES2008), 豊中, Sept. 19-20, 2008
- Zhongkui Wang and Shinichi Hirai,
Physical Parameter Identification of Rheological Object Based on FE Dynamic Model,
4th Joint Workshop on Machine Perception and Robotics (MPR2008), Beijing, China, Nov. 6-7, 2008
- 遠藤 和美, 村松 潤治, 平井 慎一,
柔軟物の内部変形計測によるFEモデルの力学パラメータ同定,
ロボティクス・メカトロニクス'07講演会予稿集CD-ROM, 秋田, May 10-12, 2007
- 活田 崇至, 平井 慎一,
ソフトマテリアルの能動的剛性変化を利用した柔らかさ提示,
ロボティクス・メカトロニクス'06講演会予稿集CD-ROM, 早稲田大学, May 26-28, 2006
- 徳本 真一, 平井 慎一,
CTスキャナを用いたパラメータ同定のための柔軟物の内部変形計測,
計測自動制御学会システムインテグレーション部門学術講演会, pp.73-74, 2006
- 遠藤 和美, 張 鵬林, 村松 潤治, 平井 慎一, 森川 茂廣,
MRIボリュームデータにおける3次元ブロックマッチングを用いたFEモデルパラメータの同定,
計測自動制御学会システムインテグレーション部門学術講演会, pp.1036-1037, 2006
- 平井 慎一, 友國 誠至,
レオロジー変形の動的モデリング,
ロボティクス・メカトロニクス'04講演会予稿集CD-ROM, 名古屋, June 18-20, 2004
- 友國 誠至, 平井 慎一,
FPGAによる仮想レオロジー物体のリアルタイム変形計算,
計測自動制御学会システムインテグレーション部門学術講演会, pp.979-980, 2004
- 友國 誠至, 杉山 勇太, 木村 政文, 平井 慎一,
仮想レオロジー物体のモデリングおよびFPGAによる実時間変形計算,
ロボティクス・メカトロニクス'03講演会予稿集CD-ROM, 函館, May 23-25, 2003
- 木村 政文, 徳本 真一, 平井 慎一,
仮想レオロジー物体変形計算のFPGA 実装,
ロボティクス・メカトロニクス'02講演会予稿集CD-ROM, 松江, June 7-9, 2002
- 木村 政文, 杉山 勇太, 友國 誠至, 平井 慎一,
仮想レオロジー物体の変形シミュレーション,
日本バーチャルリアリティ学会第7回大会論文集CD-ROM, 2002
- 木村 政文, 徳本 真一, 平井 慎一,
FPGAを用いた仮想レオロジー物体変形計算,
第20回日本ロボット学会学術講演会予稿集CD-ROM, 2002
- 杉山 勇太, 木村 政文, 友國 誠至, 平井 慎一,
仮想レオロジー物体における接触のモデリング,
計測自動制御学会システムインテグレーション部門第3回学術講演会予稿集, Vol.3, pp.23-24, 神戸市産業振興センター, Dec. 19-21, 2002
- 友國 誠至, 木村 政文, 杉山 勇太, 平井 慎一,
三要素モデルによる粘弾性物体, 塑性物体およびレオロジー物体のモデリング,
計測自動制御学会システムインテグレーション部門第3回学術講演会予稿集, Vol.3, pp.25-26, 神戸市産業振興センター, Dec. 19-21, 2002
- 徳本 真一, 平井 慎一, 田中弘美,
体積効果を用いたレオロジー物体モデリング,
ロボティクス・メカトロニクス'01講演会予稿集CD-ROM, 高松, June 8-10, 2001
- 徳本 真一, 平井 慎一,
体積要素を用いた仮想レオロジー物体のモデリング,
第19回日本ロボット学会学術講演論文集CD-ROM, 2001
- 平井 慎一, 徳本 真一,
仮想レオロジー物体における変形計算,
計測自動制御学会システムインテグレーション部門第2回学術講演会予稿集, pp.295-296, 名古屋工業大学, Dec. 20-22, 2001
- 増渕 章洋, 平井 慎一,
片側ラドン変換アルゴリズムのFPGA実装,
計測自動制御学会システムインテグレーション部門第2回学術講演会予稿集, pp.277-278, 名古屋工業大学, Dec. 20-22, 2001
- 平井 慎一, 徳本 真一, 田中 弘美,
仮想レオロジー物体の構築,
システムインテグレーション部門 学術講演会, pp.57-58, 早稲田大学 国際会議場, Dec. 21-22, 2000