Heads: Shinichi Hirai
Contact: Mizuho Shibata
Date: 1999 - 2002
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
Vision-based Object Picking
Heads: Shinichi Hirai Date: 1999 - 2002
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
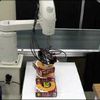
We will develop a mechanical system that can grasp and manipulate a fast planar-motion object on a table. Grasping and manipulation of an object are preformed by feeding back the position and the orientation of an object to a 7-axis manipulator PA-10.
The position and the orientation of an object are detected using realtime vision module. A 7-axis manipulator PA-10, which can be drived from a PC through realtime network ARCNET, is controlled according the detected location of the object. The realtime vision module and the PC are connected throuth ARCNET. Grasping and manipulation of an object are preformed by sending the detected position and the orientation to the PC and by controlling the manipulator using the measurements.
![[01]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/01.jpg) |
![[02]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/02.jpg) |
![[03]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/03.jpg) |
![[04]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/04.jpg) |
![[05]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/05.jpg) |
![[06]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/06.jpg) |
|
![[01]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c01.jpg) |
![[02]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c02.jpg) |
![[03]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c03.jpg) |
![[04]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c04.jpg) |
![[05]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c05.jpg) |
![[06]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c06.jpg) |
|
![[07]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/07.jpg) |
![[08]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/08.jpg) |
![[09]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/09.jpg) |
![[10]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/10.jpg) |
![[11]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/11.jpg) |
![[12]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/12.jpg) |
![[13]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/13.jpg) |
![[c07]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c07.jpg) |
![[c08]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c08.jpg) |
![[c09]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c09.jpg) |
![[c10]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c10.jpg) |
![[c11]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c11.jpg) |
![[c12]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c12.jpg) |
![[c13]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c13.jpg) |
| Personnel |
| Name | Title | Degree | |
| Akihiro Masubuchi | Graduated | Master of Eng. | |
| Satoru Natsume | Graduated | Master of Eng. |
| Publications |
| Notes |
| Related Sites |