Heads: 平井 慎一
Contact: 柴田 瑞穂
Date: 1999 - 2002
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
視覚ベース物体ハンドリング
Heads: 平井 慎一 Date: 1999 - 2002
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
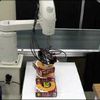
本プロジェクトでは,テーブル上を高速で運動する物体を把持し,操作する機械システムを開発する.リアルタイムビジョンモジュールと7軸マニピュレータをリアルタイムネットワークARCNETで接続し,ハンドリングを実現する.
テーブル上を運動する物体の位置と姿勢を,リアルタイムビジョンモジュールで計測する.7軸マニピュレータPA-10を,リアルタイムネットワークARCNETを通して,PCより制御する.リアルタイムビジョンモジュールとマニピュレータ制御PC間もARCNETで接続し,位置・姿勢情報を送ることにより,ハンドリングを実現する.
![[01]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/01.jpg) |
![[02]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/02.jpg) |
![[03]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/03.jpg) |
![[04]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/04.jpg) |
![[05]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/05.jpg) |
![[06]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/06.jpg) |
|
![[01]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c01.jpg) |
![[02]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c02.jpg) |
![[03]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c03.jpg) |
![[04]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c04.jpg) |
![[05]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c05.jpg) |
![[06]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c06.jpg) |
|
![[07]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/07.jpg) |
![[08]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/08.jpg) |
![[09]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/09.jpg) |
![[10]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/10.jpg) |
![[11]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/11.jpg) |
![[12]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/12.jpg) |
![[13]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/13.jpg) |
![[c07]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c07.jpg) |
![[c08]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c08.jpg) |
![[c09]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c09.jpg) |
![[c10]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c10.jpg) |
![[c11]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c11.jpg) |
![[c12]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c12.jpg) |
![[c13]](https://www.hirailab.com/pub-images/visionbasedpicking/sorting/c13.jpg) |
| 担当 |
| 名前 | 学年 | 学位 | |
| 増渕 章洋 | Graduated | 工学修士 | |
| 夏目 悟 | Graduated | 工学修士 |
| 研究発表 |
| 参考資料 |
|
|
|
|
|
|||||
|
| 関連サイト |