Heads: 王 忠奎
Contact: 岡本 春樹
Date: 2018 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
戦略的イノベーション創造プログラム(SIP)第2期/フィジカル空間デジタルデータ処理基盤「CPS構築のためのセンサリッチ柔軟エンドエフェクタシステム開発と実用化」
Associated lab/group:
|
包みグリッパ
Heads: 王 忠奎 Date: 2018 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
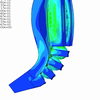
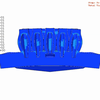
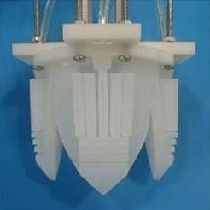
細断食品を把持するために,包みグリッパを提案する.包みグリッパは,空気圧で膨張する複数の指から構成される.空気圧を印加すると,指と指の隙間が少なくなるように指が膨張し,細断食品を把持することができる.
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/wrapping_gripper_with_corn_0275-280-0-840-720.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/wrapping_gripper_with_corn_0325-280-0-840-720.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/wrapping_gripper_with_corn_0375-280-0-840-720.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/wrapping_gripper_with_corn_0551-280-0-840-720.png) |
| 包みグリッパーがコーンを持ち上げる | |||
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/salt_grasping/salt_grasping_0_800x1000.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/salt_grasping/salt_grasping_1_800x1000.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/salt_grasping/salt_grasping_2_800x1000.png) |
![[pick up]](https://www.hirailab.com/pub-images/wrappinggripper/salt_grasping/salt_grasping_4_800x1000.png) |
| 包みグリッパによる塩の把持 | |||
| 担当 |
| 名前 | 学年 | 学位 | |
| Jin Shunan | Graduated | 工学修士 | |
| 岡本 春樹 | Graduated | 工学修士 | |
| 栗山 佳之 | Graduated | 工学修士 | |
| 松尾 泰知 | Graduated | å·¥å¦ä¿®å£« |
| 研究発表 |
| 参考資料 |
|
|
|
|
|
|||||
|
|
| 関連サイト |