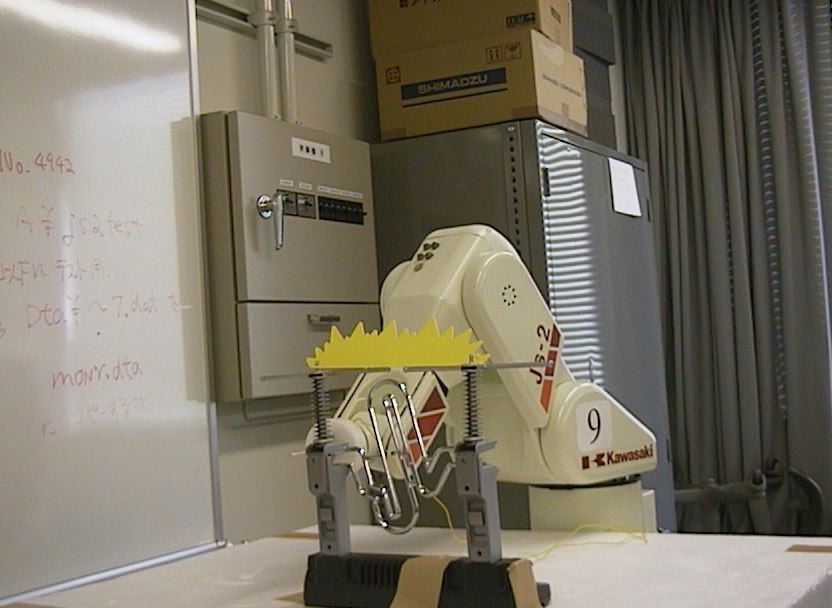
![[JS2]](shock2000-1-230x230.jpg)
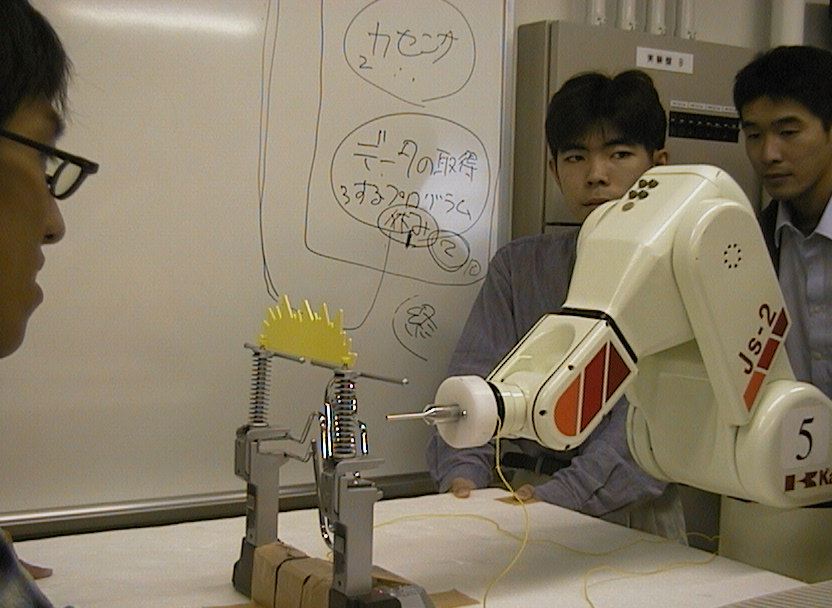
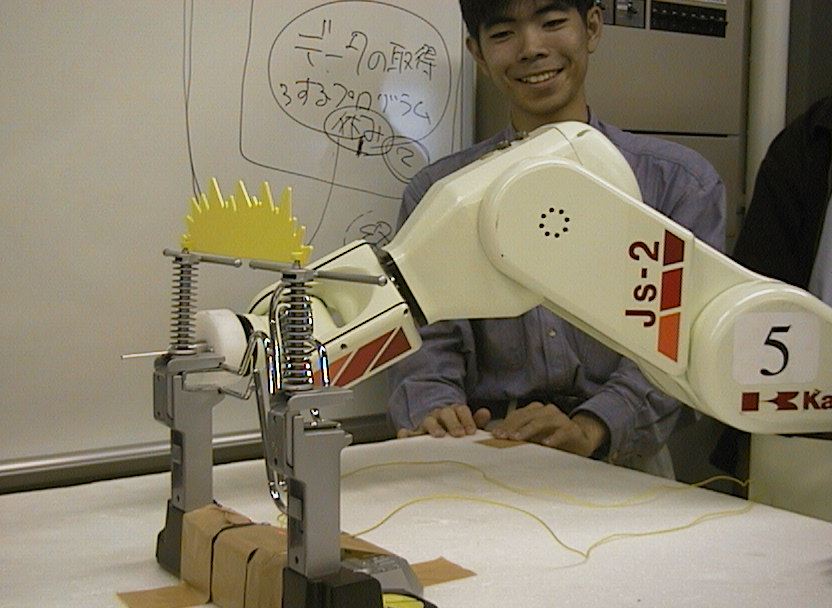
Teaching-and-playback
(MPEG 1.0MB)
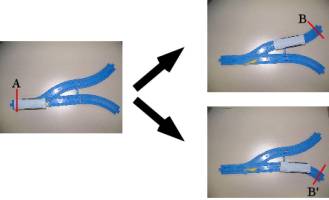
![[JS2]](shockbarexplain-230x230.jpg)
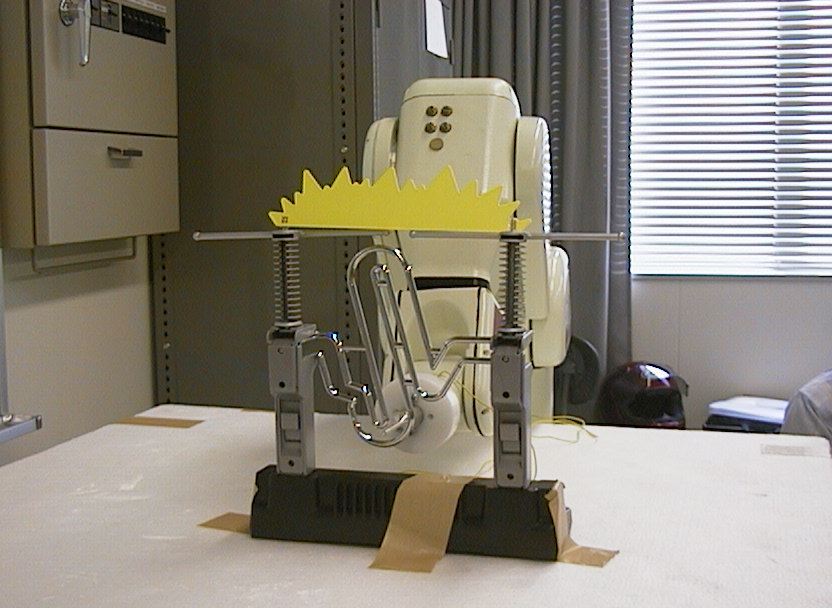
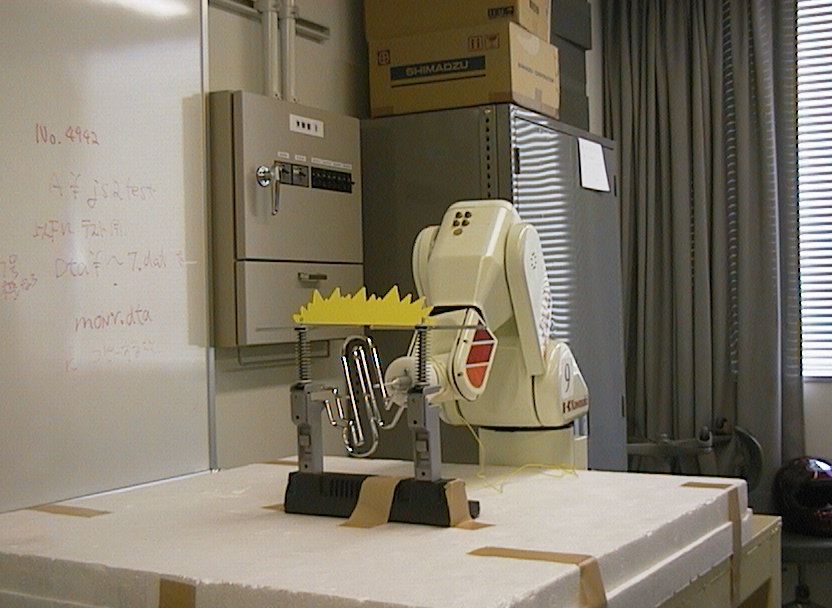
Explanation on trajectory plan for irritating bar game
(MPEG 18.5MB)

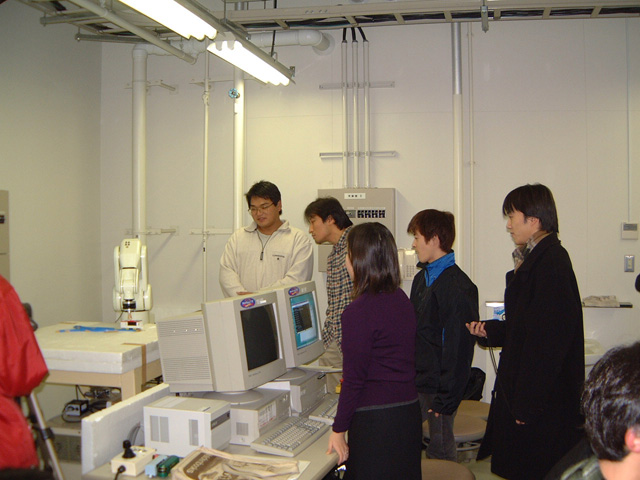
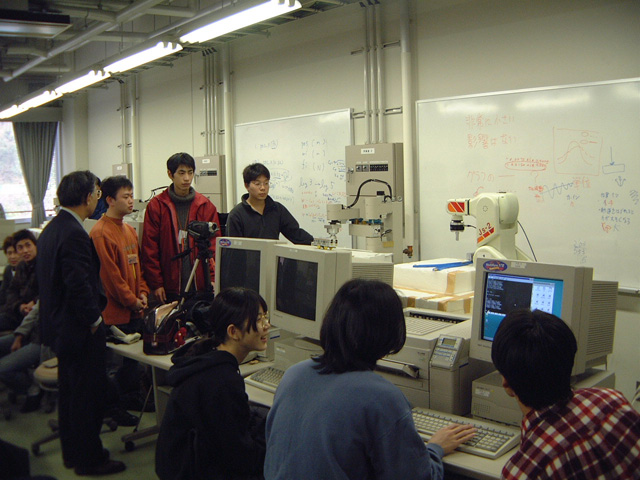
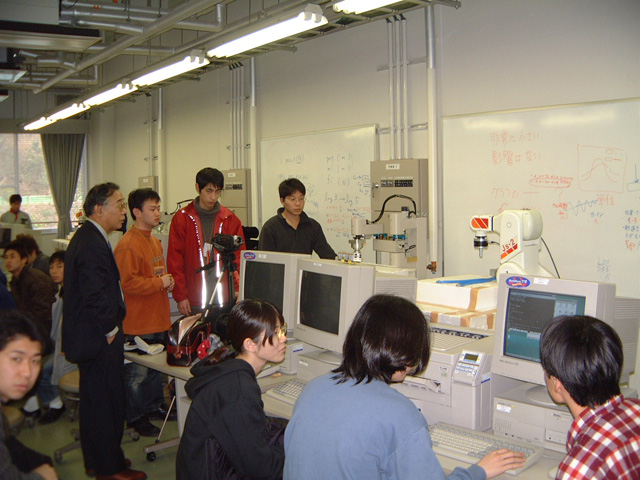
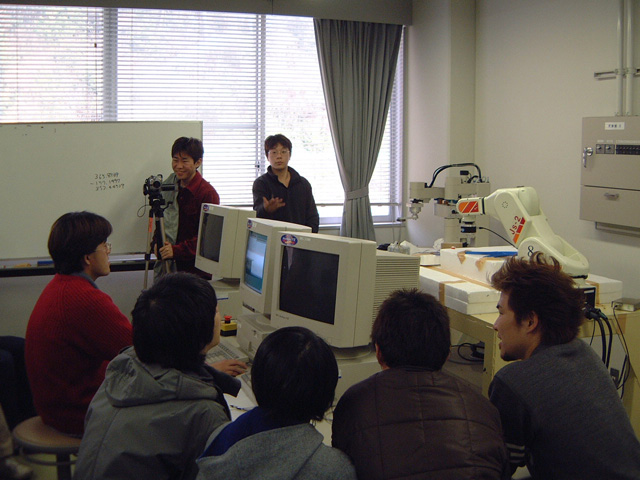
Robot Task Experiment
Task Realization Contest
Task Realization Contest
Specified Task
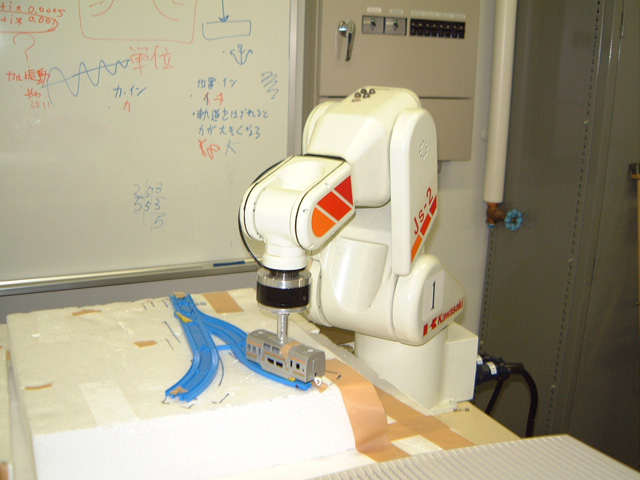
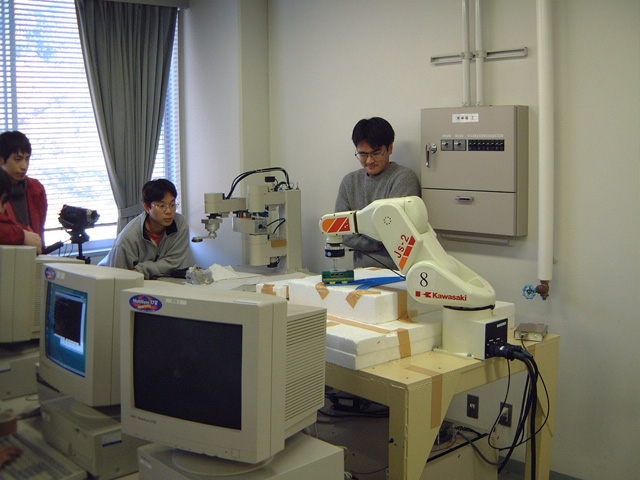
Stundents in this experiment will develop a task strategy for robotics tasks such as peg-in-hole insertion, crank turning, and jaggling. Then, they will realize the developed strategy on a 6 d.o.f. mechanical manipulator so that the manipulator can perform the given task. (Dept.Robotics, B3)
| 1st | Introduction of experimental setup | |
| 2nd, 3rd | Position/trajectory control by teaching-and-playback | |
| 4th - 6th | Trajectory/impedance control | |
| 7th - 9th | Force/impedance control | |
| 10h - 14th | Task realization and contest |
| Evaluation: | attendance record and reports |
| Textbook: | handouts |
|
Teaching-and-playback (MPEG 1.0MB) |
Explanation on trajectory plan for irritating bar game (MPEG 18.5MB) |
Robot Task Experiment Task Realization Contest |
Task Realization Contest Specified Task |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
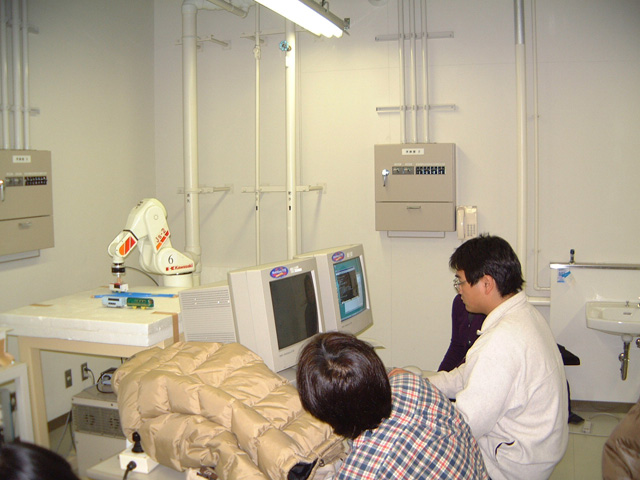
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/shock2.jpg) Teaching-and-playback (irritating bar game) |
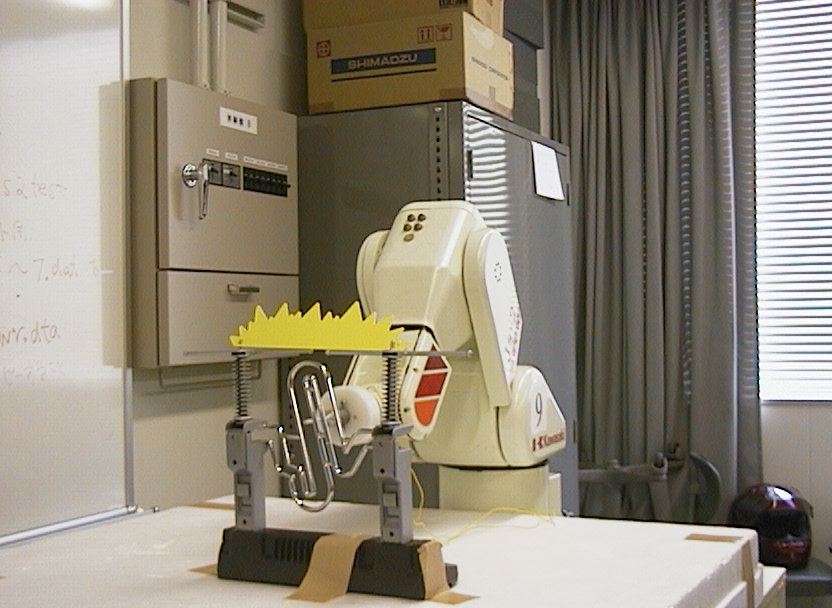
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/shock6.jpg) Teaching-and-playback (irritating bar game) |
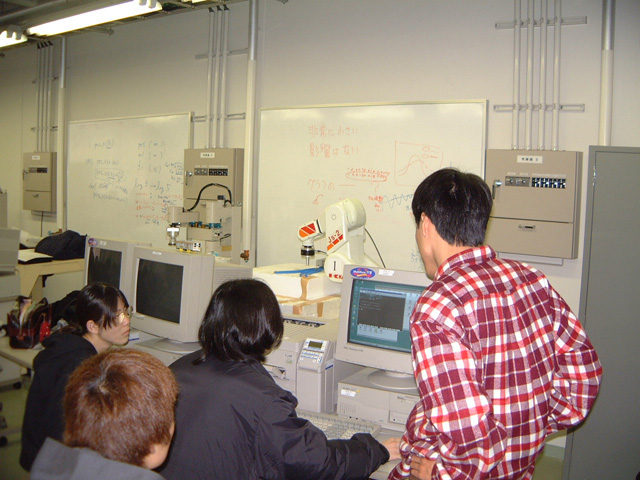
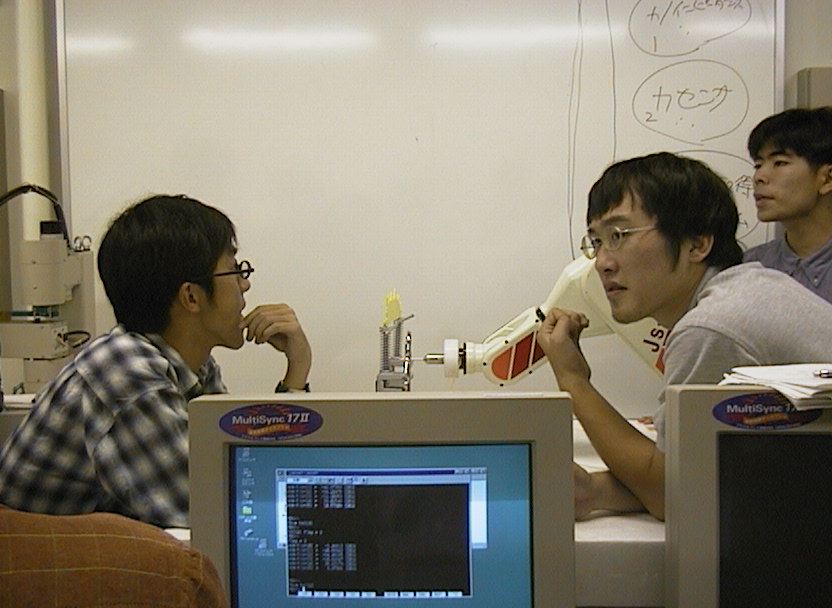
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/roller0.jpg) Trajectroy/force/ impedance control (rolling a roller) |
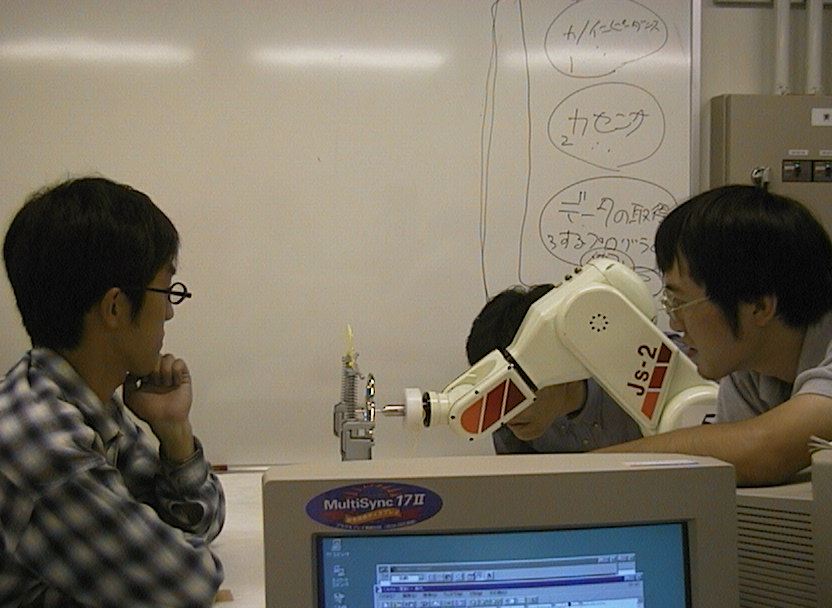
![[JS2]](http://www.hirailab.com/pub-images/robot-task-experiment/roller3.jpg) Trajectroy/force/ impedance control (rolling a roller) |