Heads: Shinichi Hirai
Contact: Kotaro Kishikawa
Date: 2003 -
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
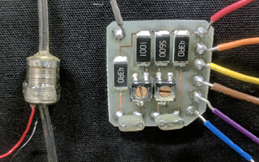
Micro Pneumatic Valve
Heads: Shinichi Hirai Date: 2003 -
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
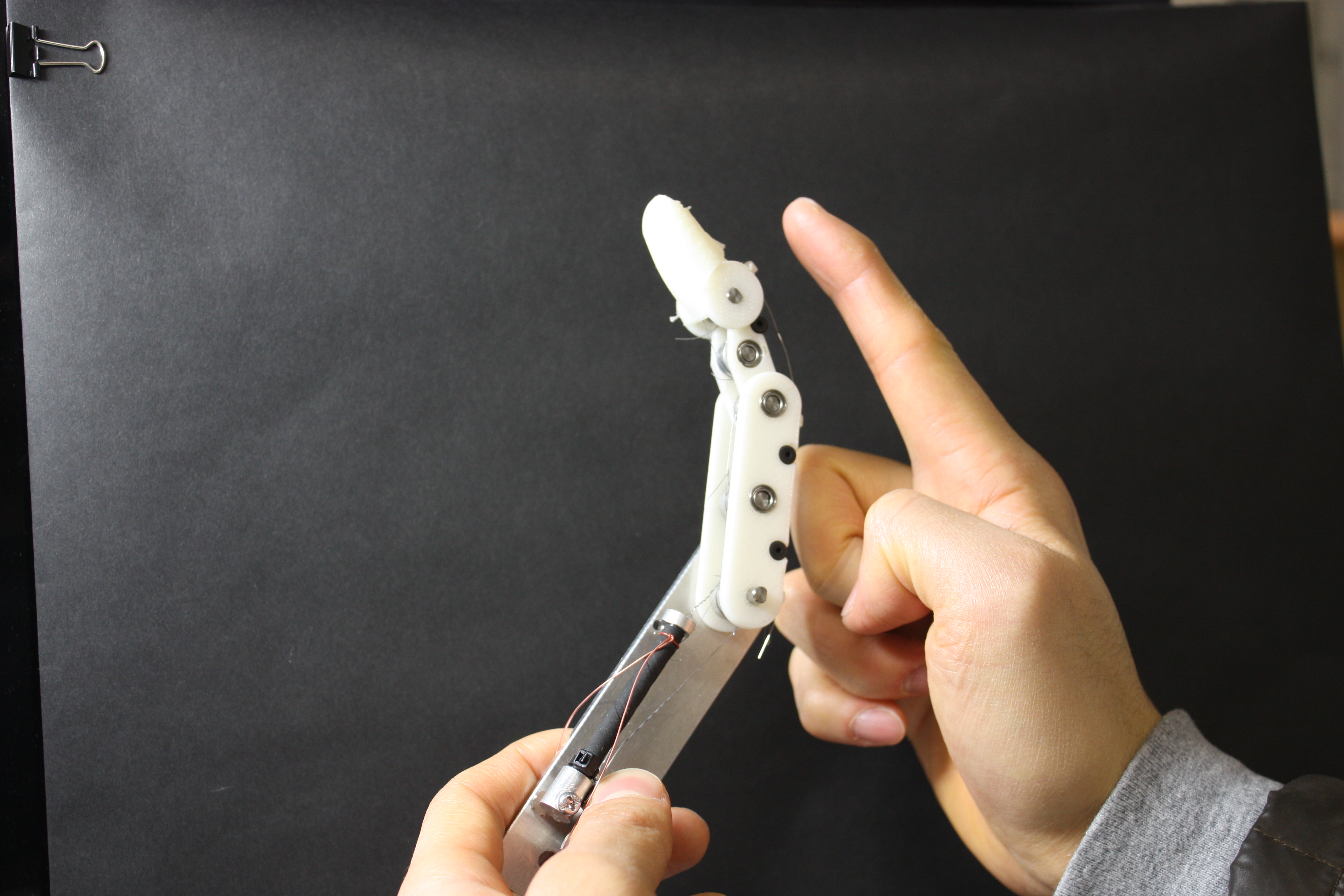
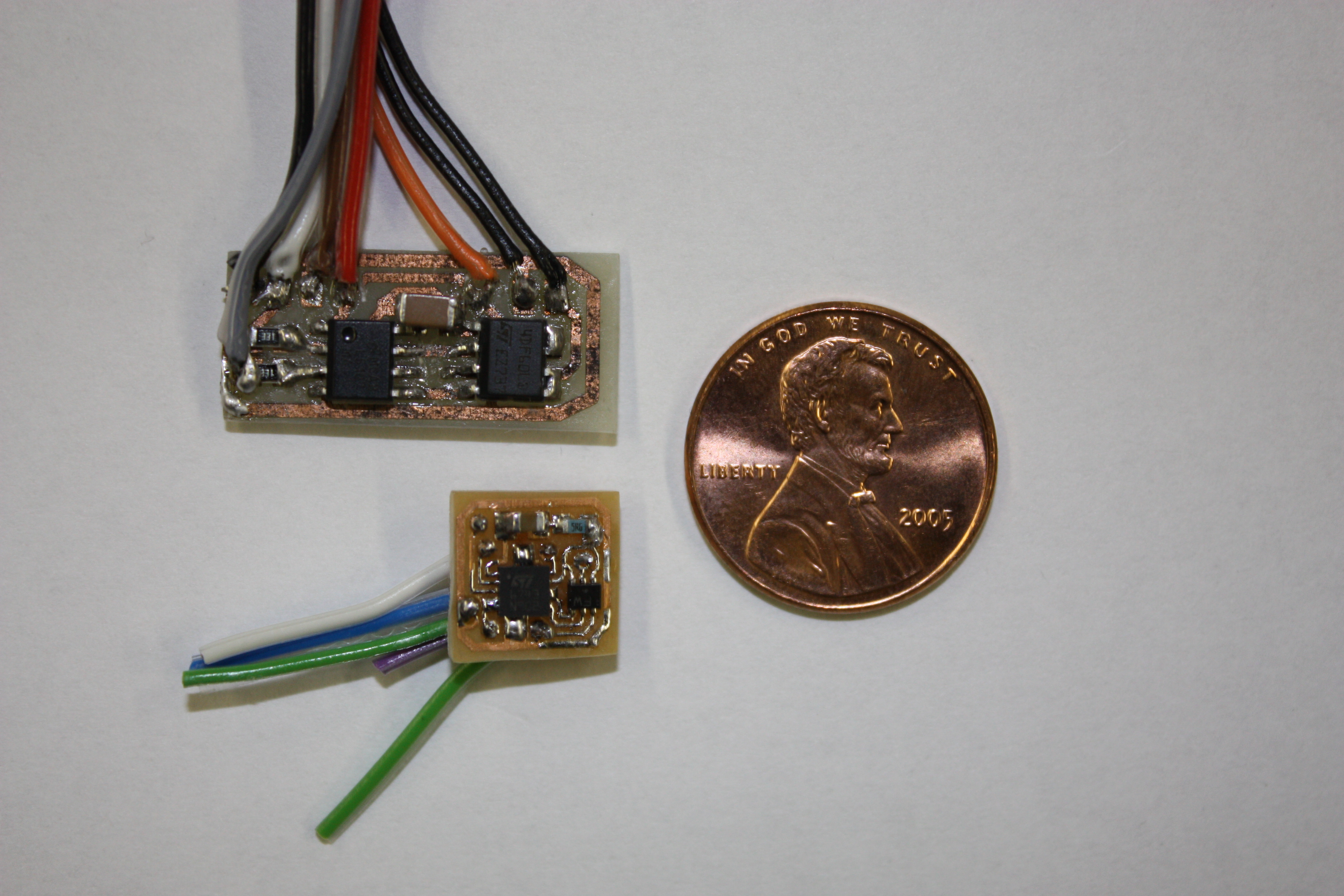
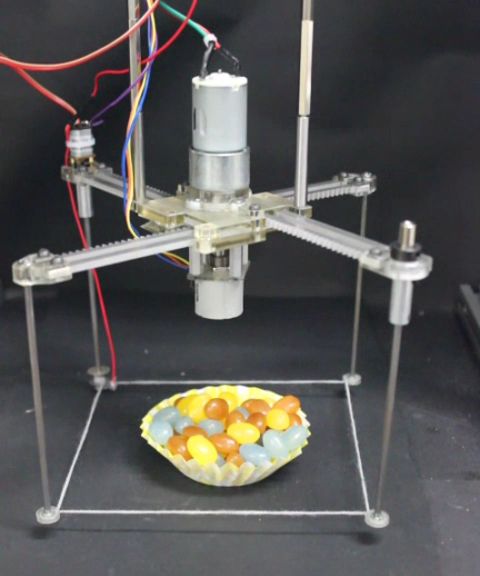
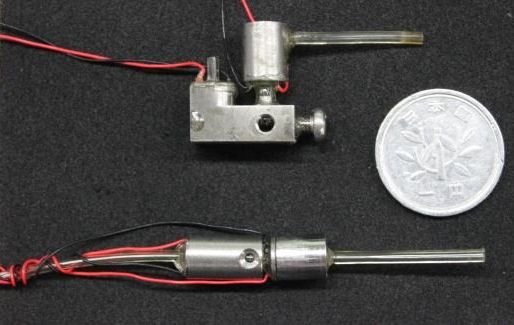
We develop a micro pneumatic proportional valve that can be embedded into pneumatic muscles and can control air flow of 0.5 MPa pressure and 5 l/min flow rate to drive the pneumatic muscles.
| 2019/5/30 | Lecturing "Vibration-driven Micro Pneumatic Valves" at a seminar in spring conference of Japan Fluid Power System Society |
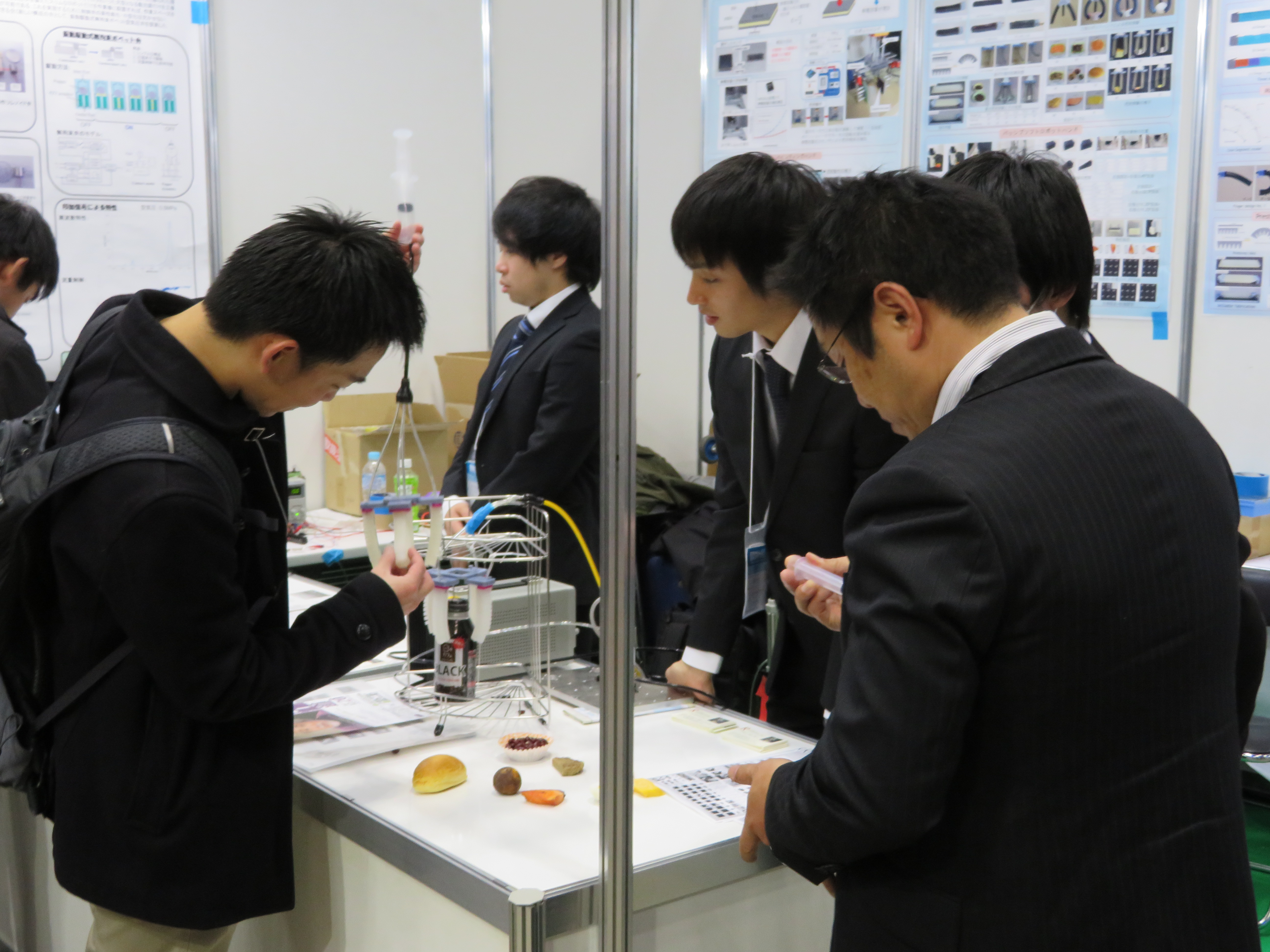
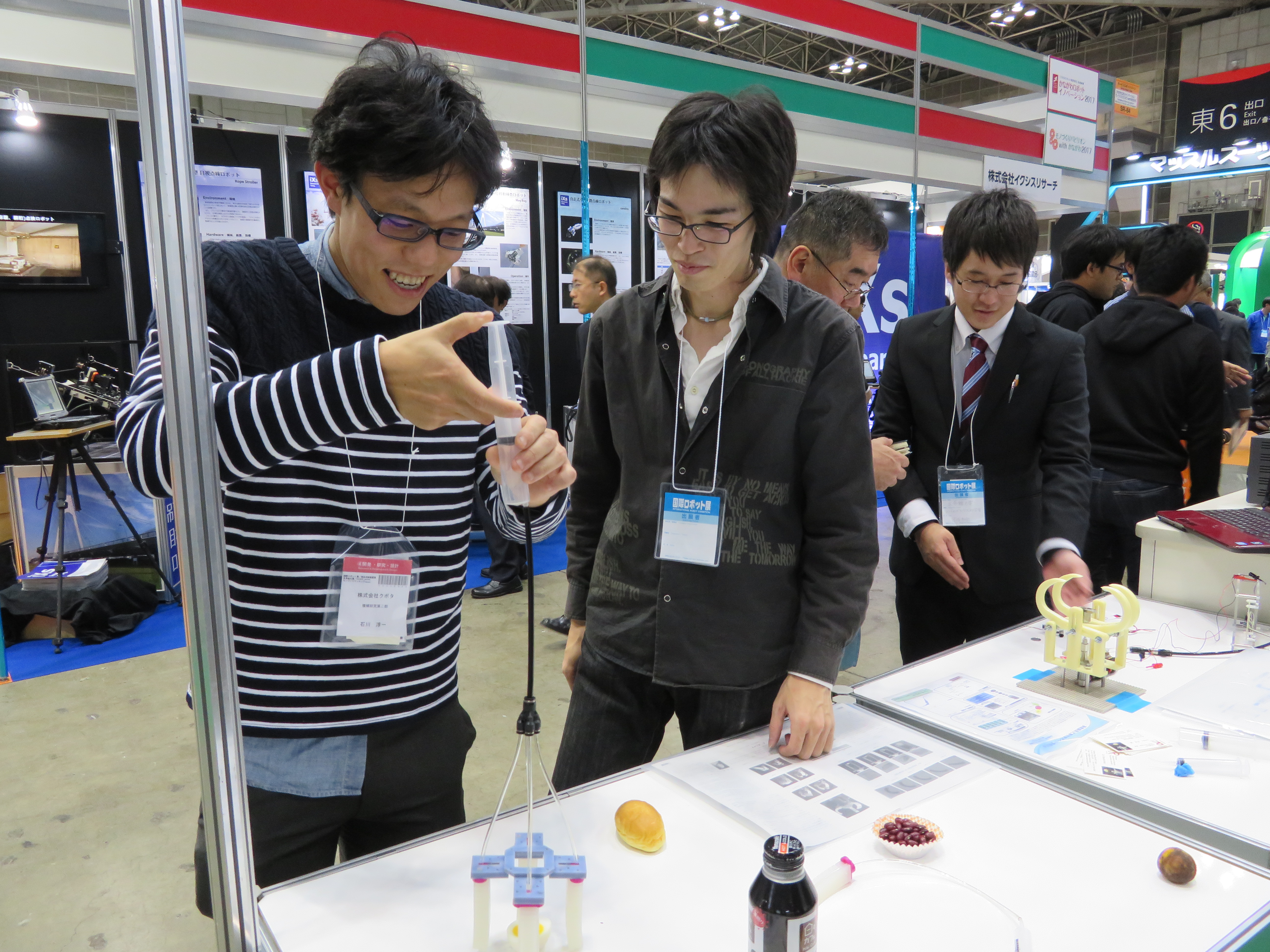
| 2017/11/29-12/2 | Demonstrating soft grippers and micro pneumatic valves at International Robot Exhibition |



|
|
| 2015/12/18 | Demonstrating micro pneumatic valves at Robotics Technology Seminar in Grand Front Osaka |
| 2015/12/2-5 | Demonstrating binding hands and micro pneumatic valves at International Robot Exhibition |

|
|
| 2009/8/1 | Demonstration of unconstrained poppet valves and tensegrity robots in Open Campus. |
| 2006/11/30-12/2 | Exhibition of Unconstrained Poppet Valves at International Next Generation Robot Fair (INTEX Osaka). (Nikkan Kougyo Shimbun 2006/11/21) (photo in article) |
| Personnel |
| Name | Title | Degree | |
| Kotaro Kishikawa | Graduated | Master of Eng. | |
| Furuta Haruki | Graduated | Master of Eng. | |
| Kubo Toshiki | Graduated | Master of Eng. | |
| Fujiki Ryosuke | Graduated | Master of Eng. | |
| Kouhei Yamamoto | Graduated | Master of Eng. | |
| Koutaro Taniwa | Graduated | Master of Eng. | |
| Kazuya Miyaji | Graduated | Master of Eng. | |
| Suzuki Higuchi | Graduated | Master of Eng. | |
| Kazuhiro Kato | Graduated | Master of Eng. | |
| Kenta Kouzai | Graduated | Master of Eng. | |
| Kazuhiro Izusawa | Graduated | Master of Eng. | |
| Masayuki Tatsumi | Graduated | Master of Eng. | |
| Yoichiro Ogawa | Graduated | Master of Eng. | |
| Jien Sumadi | Graduated | Ph.D | |
| Shouta Uehara | Graduated | Master of Eng. | |
| Nagai Syunya | Graduated | Master of Eng. | |
| Zhou Ziyuan | Graduated | ||
| Zhao Zifu | Graduated | ||
| Kishida Takumi | Graduated | ||
| Kanako Fujiwara | Graduated | ||
| Masahiko Ito | Graduated | ||
| Hiroshi Takayama | Graduated |
| Publications |
| Notes |
| Related Sites |


20110302_181850-100x100.jpg)

20110302_181850.png)