Heads: 平井 慎一
Contact: 柴田 瑞穂
Date: 2008 - 2016
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
科学研究費補助金 挑戦的萌芽研究 (No.25630098) 2013 - 2014 (平井 慎一)
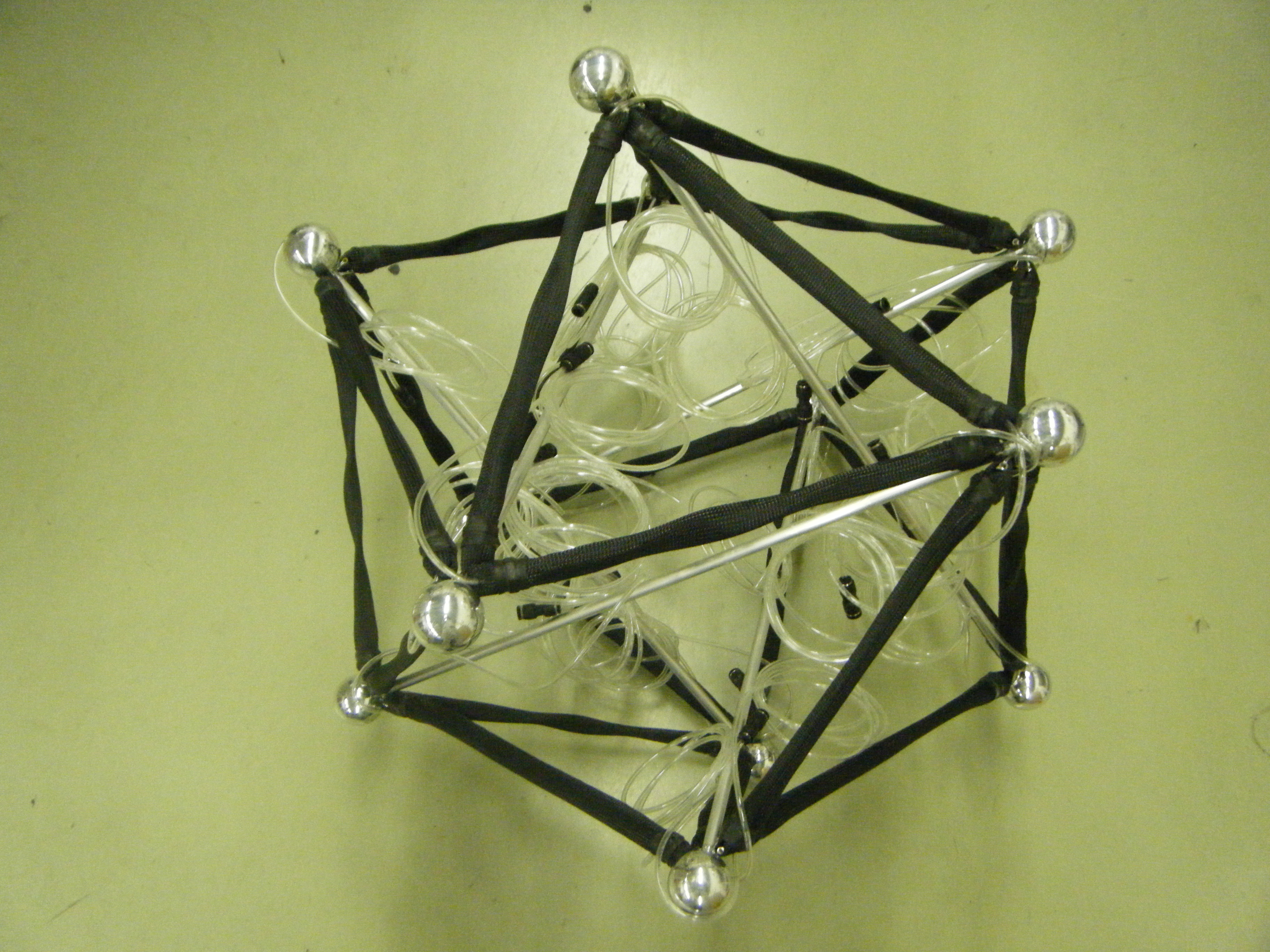
テンセグリティ構造の動的移動におけるダイナミクス
科学研究費補助金 若手B (No.21760210) 2009 - 2011 (柴田 瑞穂)
柔軟体の変形を積極的に利用する移動機構の巧みさの解明
Associated lab/group:
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h51m40s31-150x113.jpg)
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h52m19s166-150x113.jpg)
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h52m45s0-150x113.jpg)
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h52m58s57-150x113.jpg)
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h53m11s237-150x113.jpg)
![[00]](https://www.hirailab.com/pub-images/tensegrity/vlcsnap-2011-09-14-22h53m22s81-150x113.jpg)