Heads: 平井 慎一
Contact: 高垣 祐介
Date: 2008 - 2013
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
(財)立石科学技術振興財団 研究助成(A) 「帯状物体のマニピュレーションに関する研究」
Associated lab/group:
|
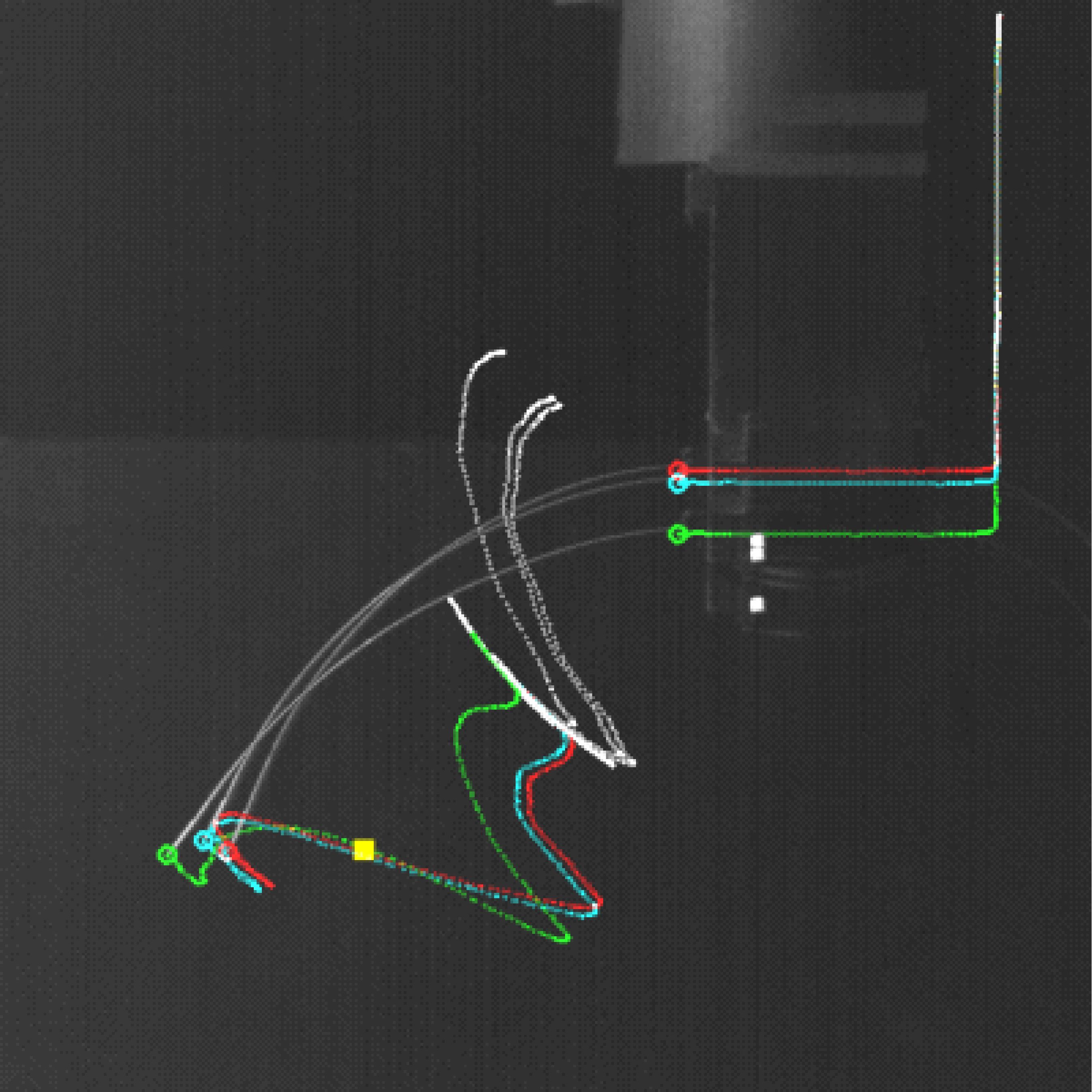
帯状物体操作
Heads: 平井 慎一 Date: 2008 - 2013
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究は,フラットケーブルやフレキシブル基板に代表される帯状物体の操作を実現することを目的とする.視覚を通して物体の力学特性を推定し,マニピュレータの軌道を制御することにより,帯状物体を操作する.
| 2013/5/23 | 公益財団法人 立石科学技術振興財団 平成25年度 助成金贈呈式にて 「帯状物体のマニピュレーションとモデリング」を発表 |
| 2011/4/1 | (財)立石科学技術振興財団 研究助成(A) 「帯状物体のマニピュレーションに関する研究」 が採択されました. |
| 担当 |
| 名前 | 学年 | 学位 | |
| 高垣 祐介 | Graduated | 工学修士 | |
| 民谷 真孝 | Graduated | 工学修士 | |
| 大庫 辰哉 | Graduated | 工学修士 | |
| 片岡 祐岐 | Graduated | 工学修士 | |
| 松原 健二 | Graduated | 工学修士 | |
| 相馬 稔樹 | Graduated | ||
| 石井 匠 | Graduated |
| 研究発表 |
| 参考資料 |
|
|
|
| 関連サイト |