| 研究概要 |
本研究では,自発的な動きのある生物のマニピュレーションにおける原理を探求し,ロボットハンドによる生物のマニピュレーションを実現する.
|
|
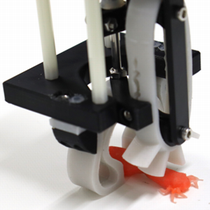
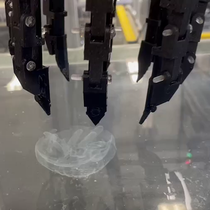
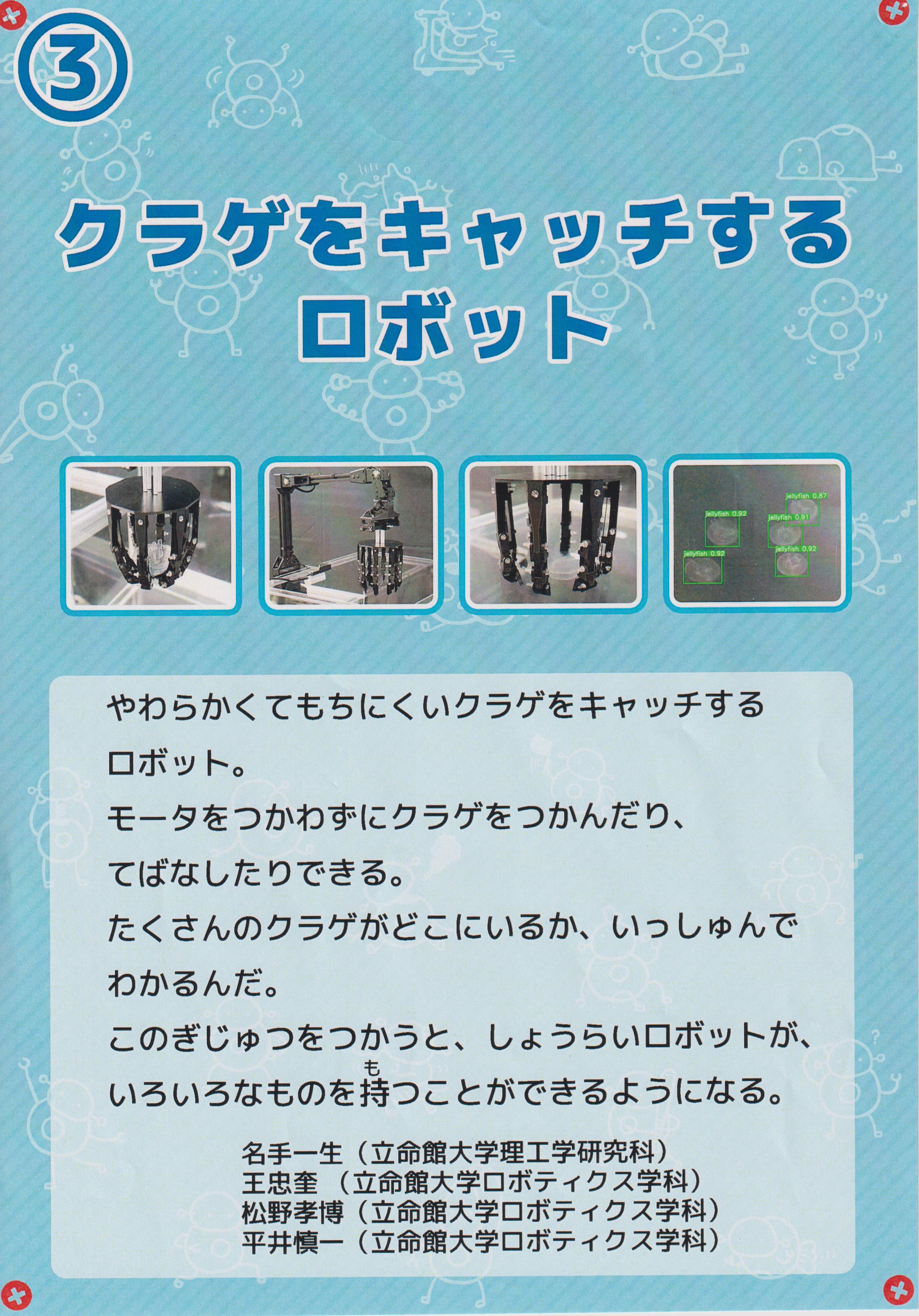
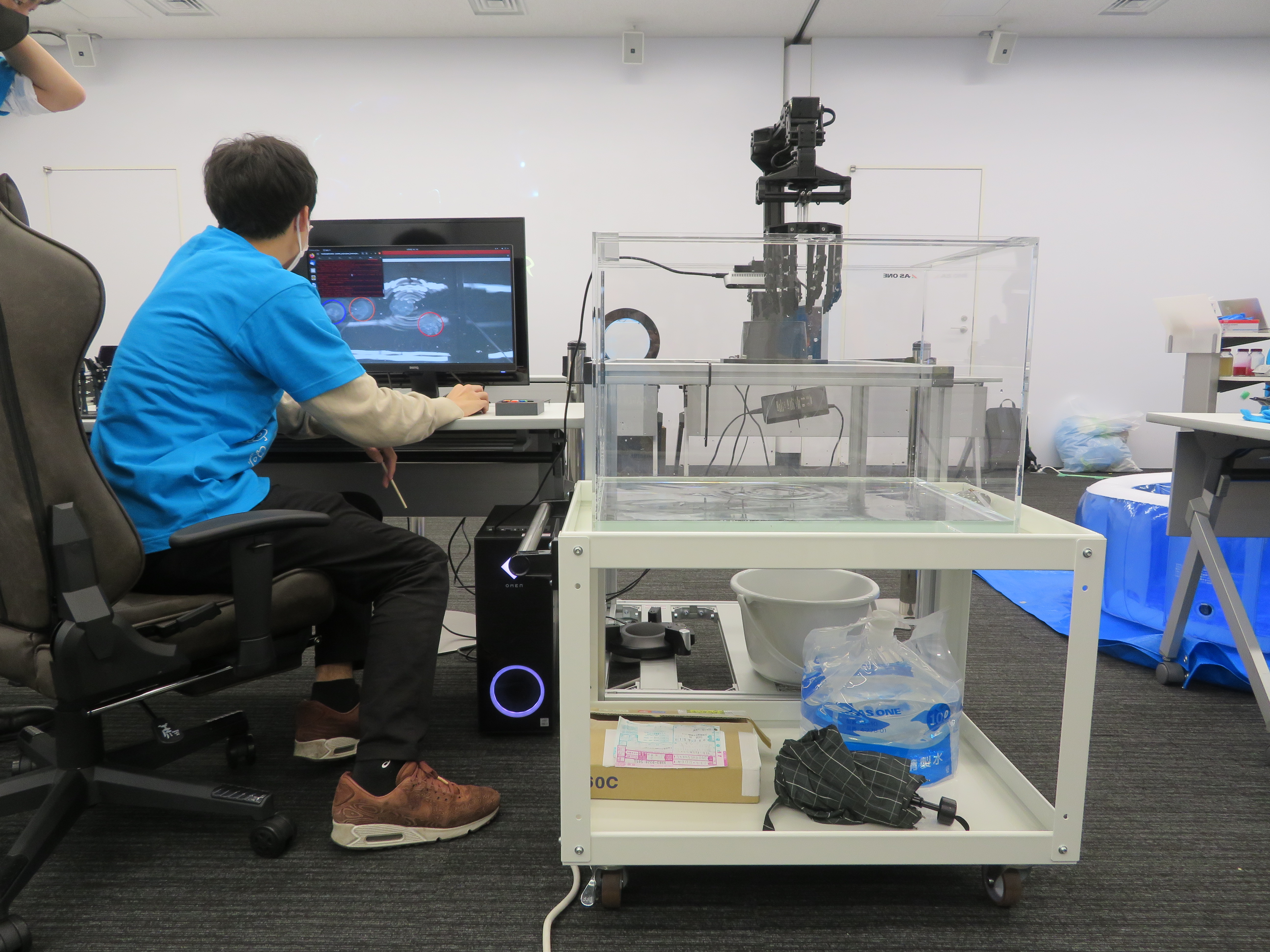
| 蚕の把持と操作 | クラゲの把持と操作 |
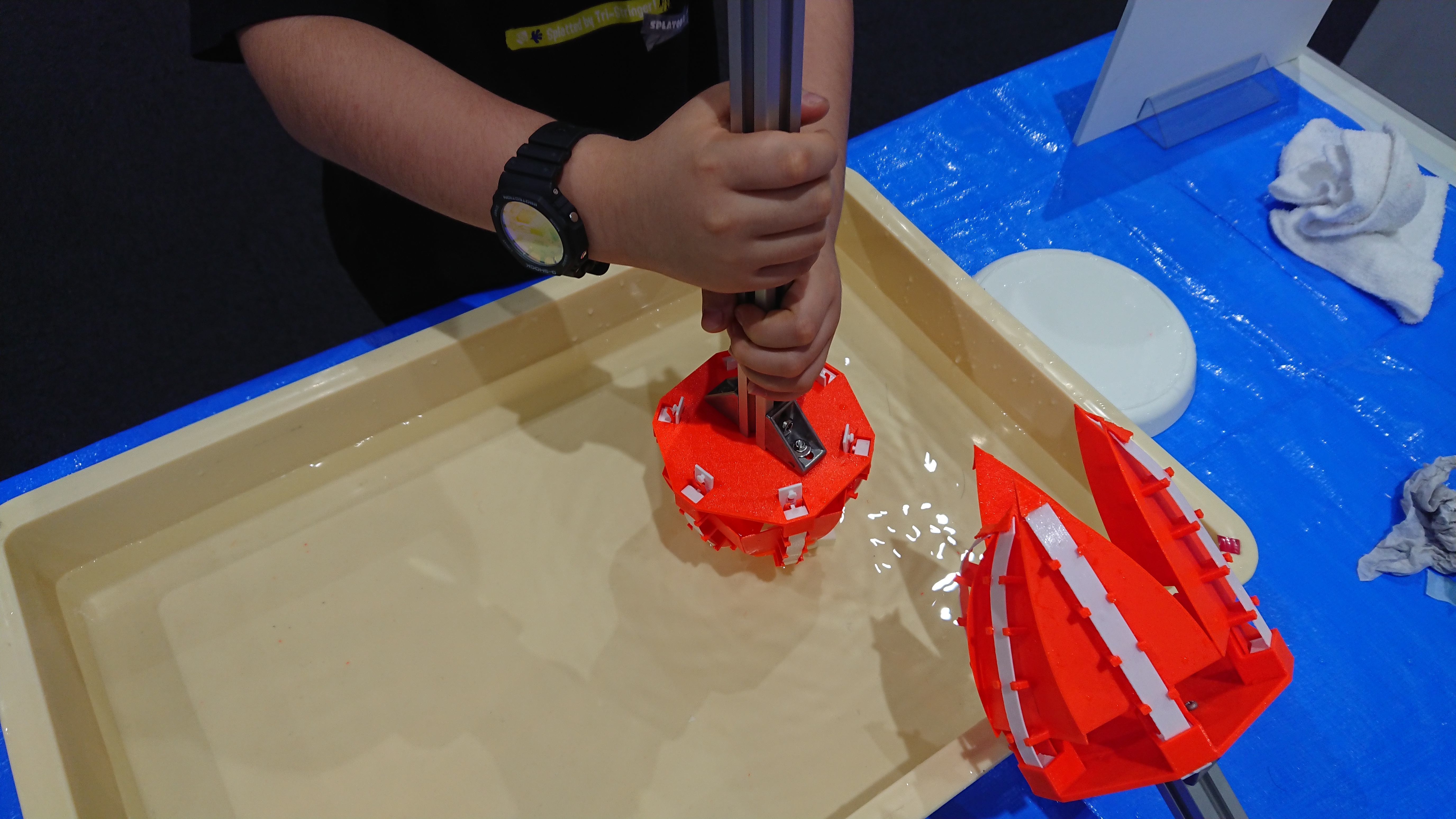
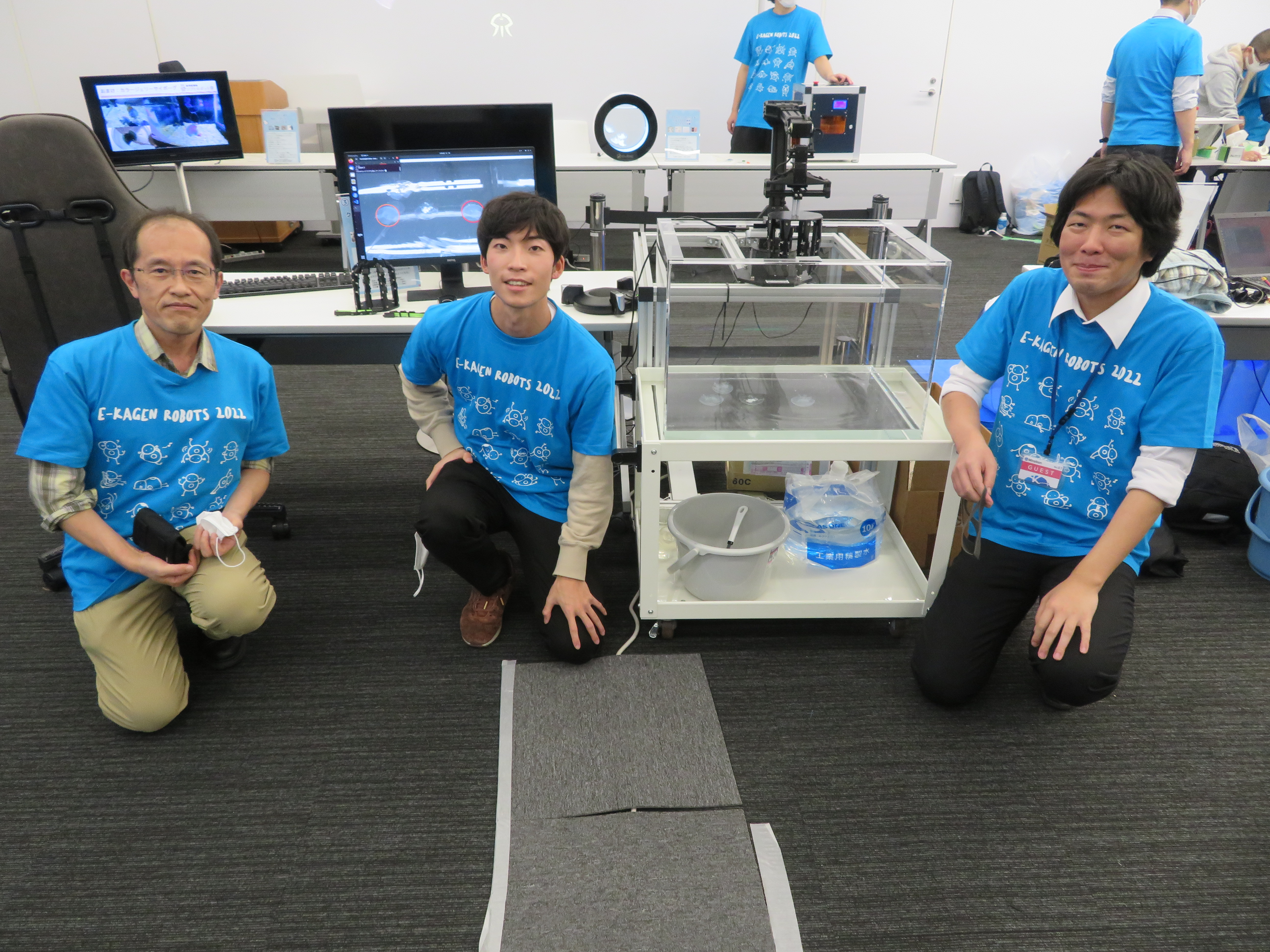
| 2023/9/23 | いいかげんなロボット展@福岡市科学館でクラゲキャッチャーを展示 | ||||||||



|
|||||||||
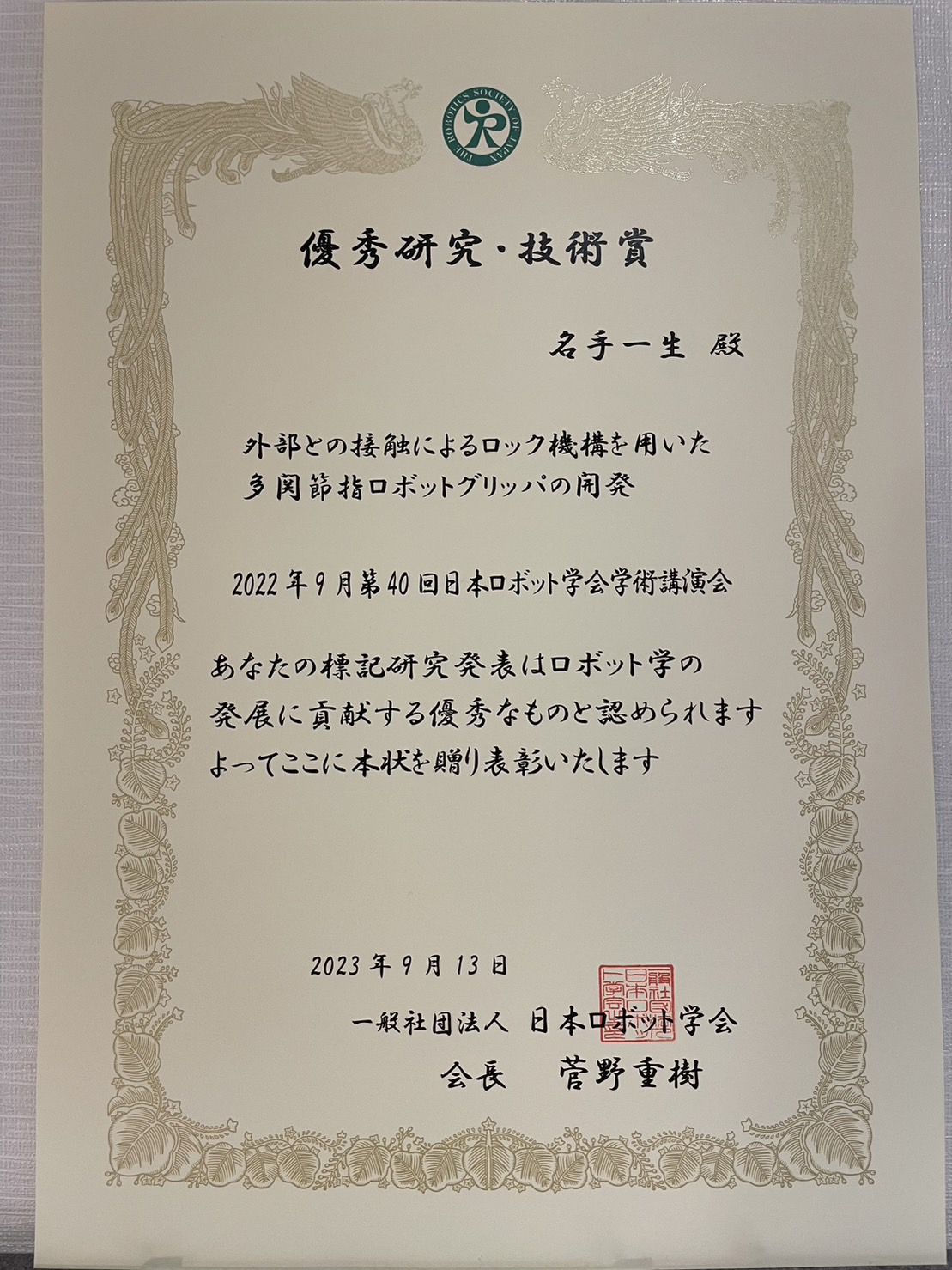
| 2023/9/13 | 名手君,王先生,平井が「外部との接触によるロック機構を用いた多関節指ロボットグリッパの開発」で「日本ロボット学会 第4回優秀研究・技術賞」を受賞しました. | ||||||||
| |||||||||
| 2023/6/2 | ICRA23 workshop on robot assisted safe manipulation of hazardous materialsでSoft Hands Grasping and Manipulating Living Organismsと題して講演 | ||||||||
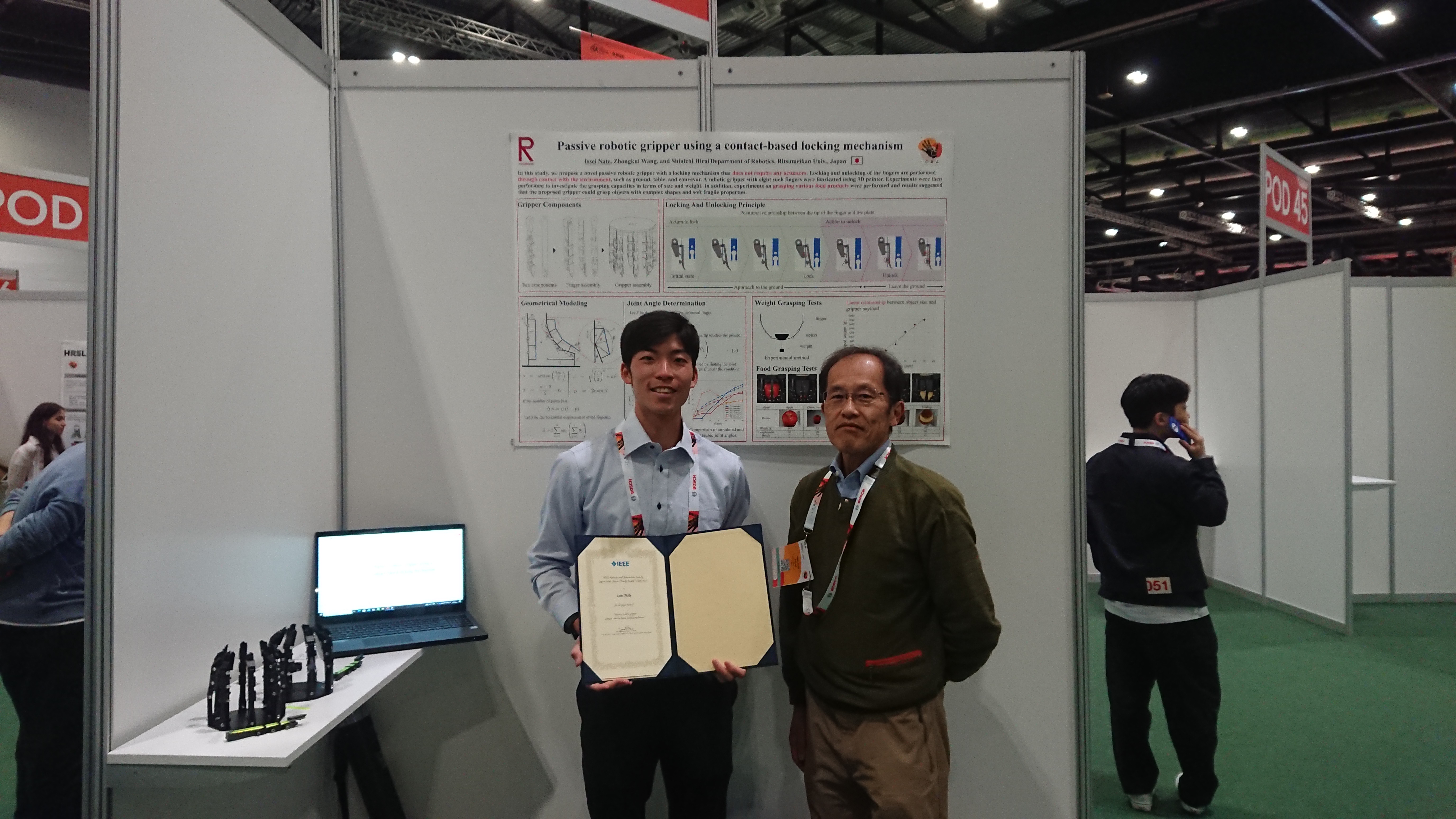
| 2023/5/31 | 名手君がIEEE RAS Japan Joint Chapter Young Award (ICRA2023)を受賞しました. | ||||||||


|
|||||||||
| 2022/12/4 | いいかげんなロボット展でクラゲをキャッチするロボットを展示 | ||||||||


|
|||||||||
| 2022/3/14-3/15 | ソフトロボット拡大総括班会議@鶴岡(加茂水族館&Suiden Terrasse) | ||||||||









|
|||||||||
| 予算 |
| 研究発表 |
| 関連サイト |



{kind=link}