
| Description |
We will develop soft sensors composed of soft materials for force, tactile, and proximity sensing. Sensors are composed of soft materials such as conductive cloth, conductive yarn, and elastomer. We will conduct research on sensor materials and structures as well as sensing algorithms.
Force, tactile, and proximity sensation are important for robots to work in contact with the environment. By introducing a soft material into the contact area so that the material acts as a soft interface between the robot and the environment, the robot can perform contacting work by absorbing the uncertainty of the environment. Since such robots require soft sensors, we will conduct research on soft sensors that can be embedded in the soft interface.
|
|
|
|
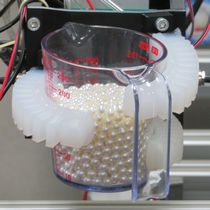
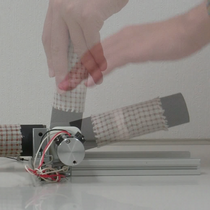
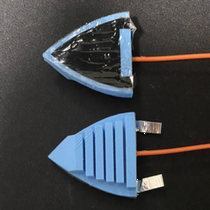
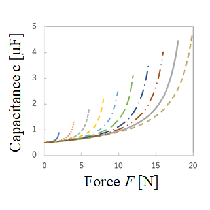
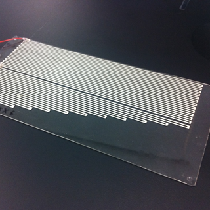
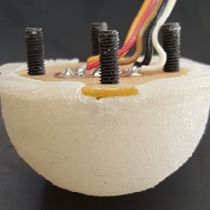
| IPMC sensors in soft hands | conductive fabric sensor | bend sensing of soft fingers | capacitive force sensor |
|
|
|
|
| surface bend sensor | soft fingertip sensor | fiber sensor |
| 2024/11/7 | Proposal for Adaptive and Seamless Technology transfer Program through targetdriven (A-STEP) R&D was accepted Development of Flexible Sensors Capable of Determining Grasping Conditions in Soft Robot Hands with Their Control Models |
| 2022/12/6 | Detecting grasping, releasing, or object dropping during object manipulation using flexible sensors in soft robot hands |
| 2022/12/1 | Detecting grasping, releasing, or object dropping during object manipulation using flexible sensors in soft robot hands |
| 2022/10/23 | Presenting "Fabric-based Proximity/Contact Sensors Applied to Two-DOF Variable Stiffness Mechanism" in IROS 2022 Workshop "Large-scale robotic skin: Perception, Interaction, and Control" |

|
|
| 2021/3/11 | Denpa Shimbun Daily article introduced Dr. Matsuno's research on proximity sensing algorithm. |
| Budget |
| Publications |
| Related Sites |