

-210x210.png)
| 研究概要 |
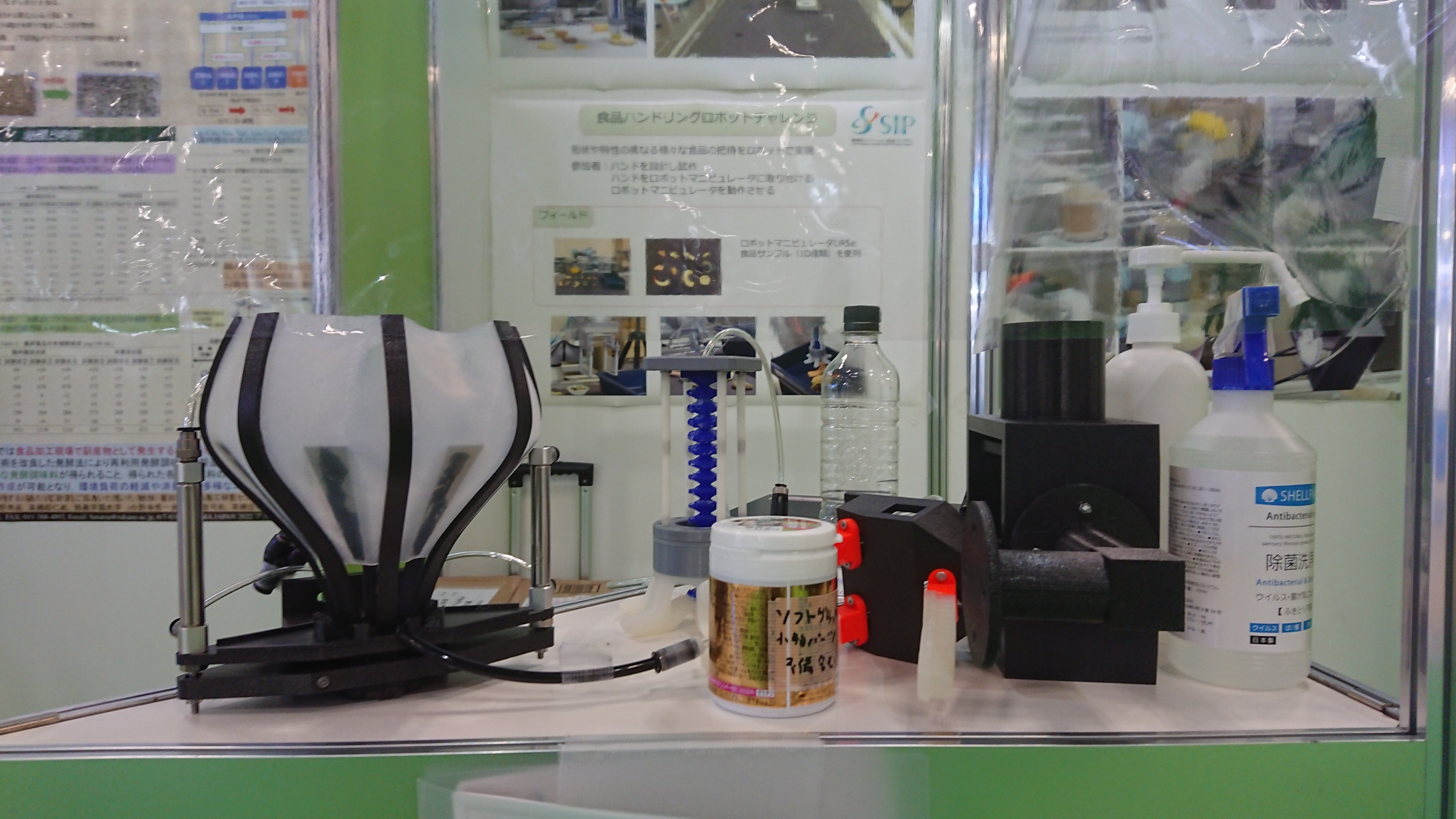
本研究の目的は,ロボットシステムによる食品マニピュレーションを実現することである.そのために,食品ハンドリング用ソフトグリッパー,ハンドリング用センサ,食品の特性計測とモデリングに関する研究を進める.
日本では,一日に数百万食の弁当が製造,販売されている.弁当への食品のパッキングは,そのほとんどを人手に頼っているのが現状である.賞味期限の観点から,弁当は消費地の近くで製造する必要がある.しかしながら,人手を確保することが近年は困難になりつつあり,パッキング作業の自動化が望まれている.また,菓子の箱への詰め込みや農水産物の仕分け等において,自動化への要望が高い.近年の人手不足に伴い,これまで人手で成されてきたハンドリング作業の自動化が必要とされている.
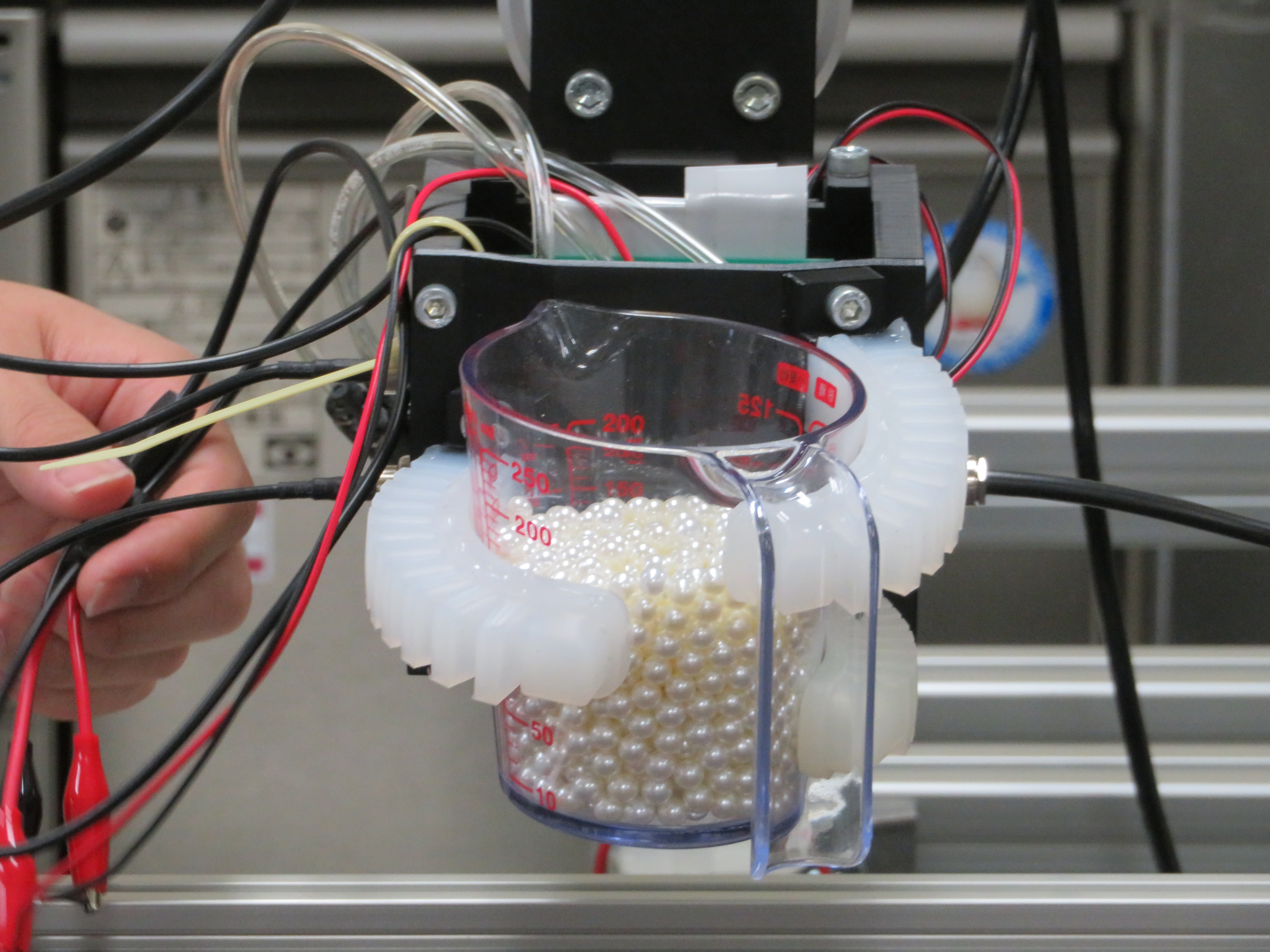
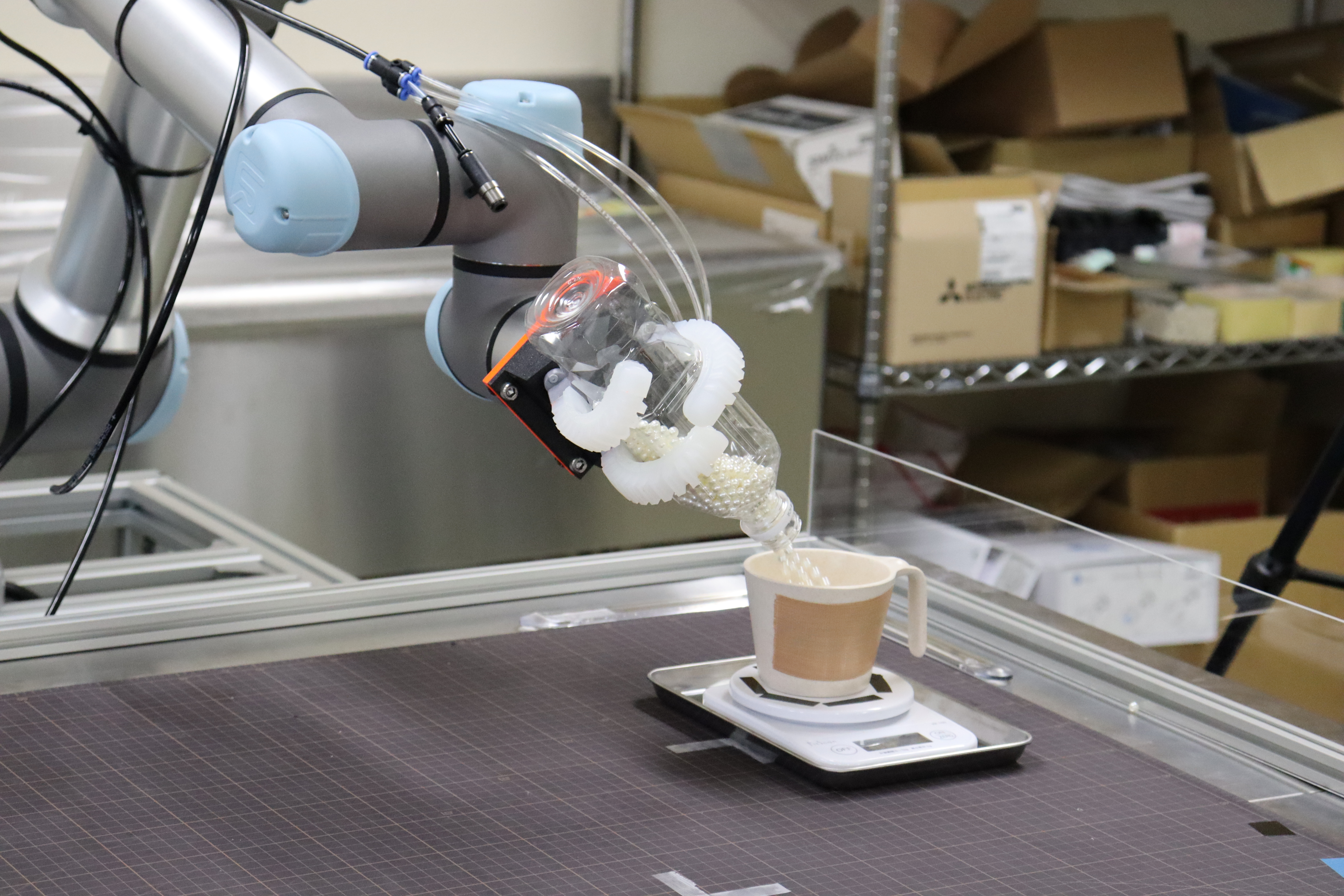
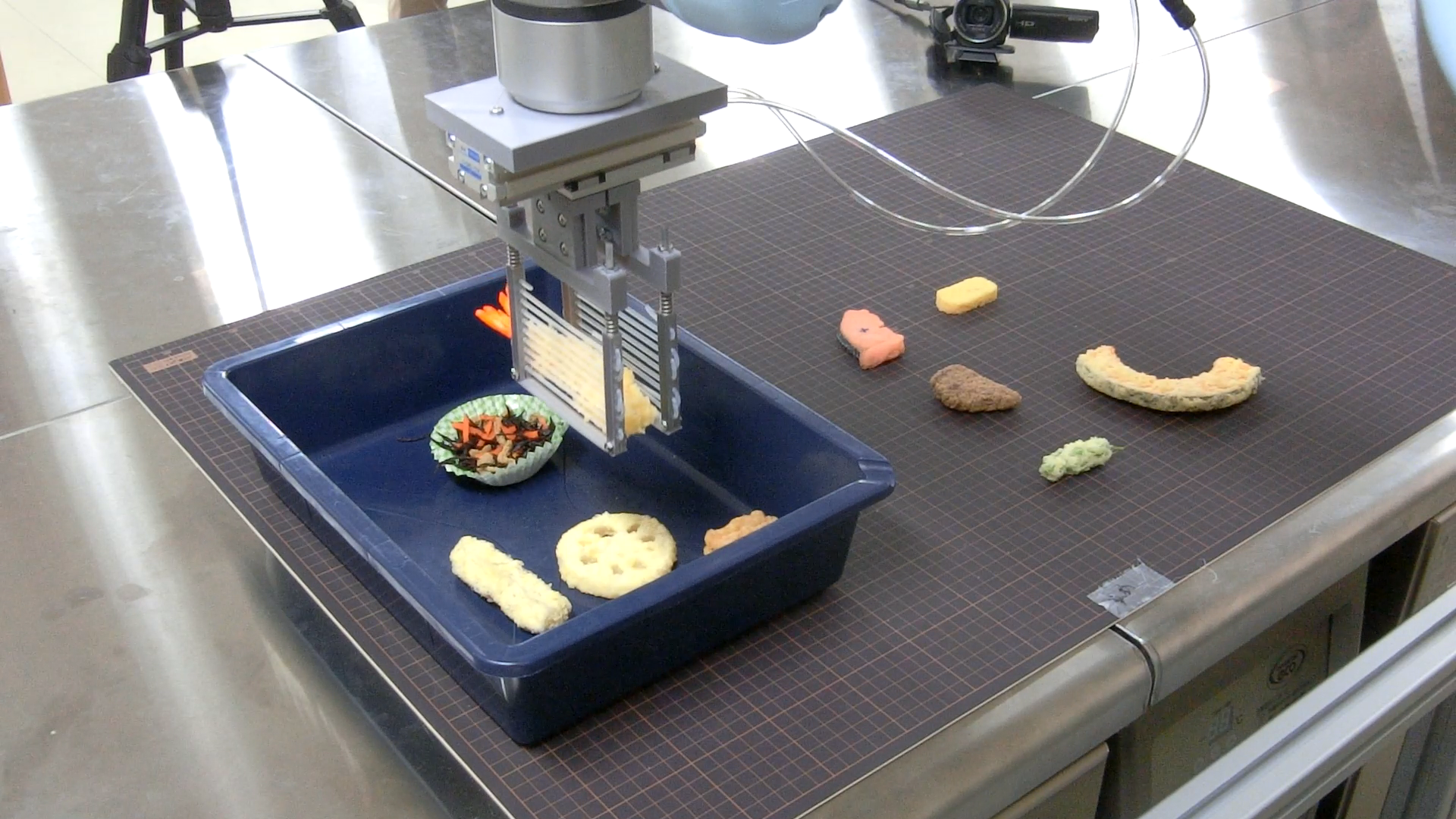
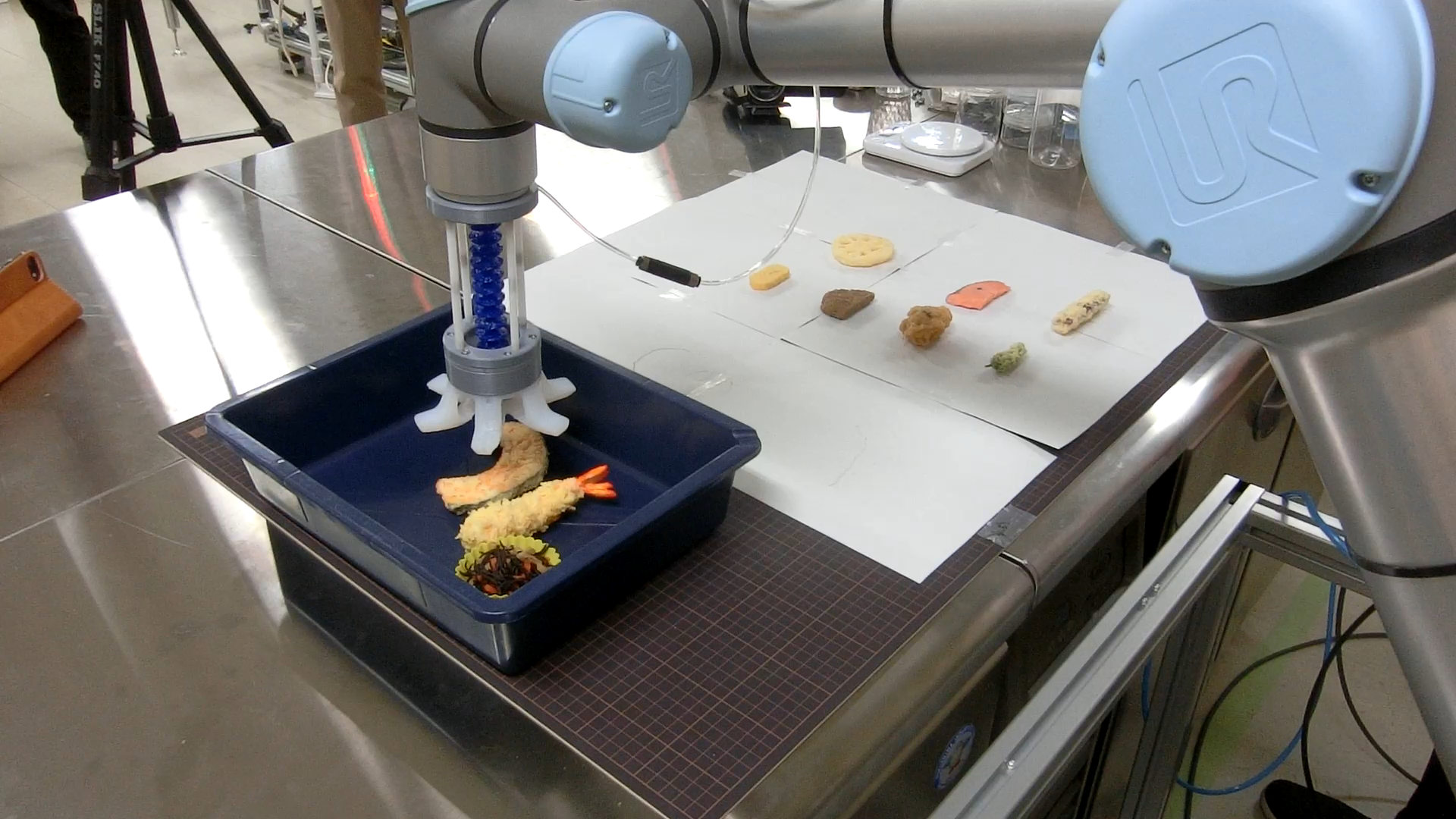
食品のハンドリングが困難である理由として,多くの食品が柔らかく,さらに食品の形状や特性のばらつきが大きいということが挙げられる.食品の形状や特性のばらつきに対応してハンドリングを実現する一つの方策は,エラストマーやファイバーに代表される柔軟な材料をロボットハンドに導入することである.すなわち,食品と接触する物理的インターフェース部分に柔らかい材料を用いることにより,形状や特性のばらつきが吸収されることを期待できる.
|
|
|
|
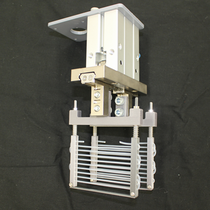
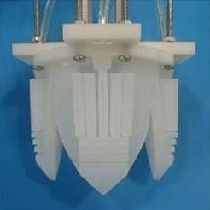
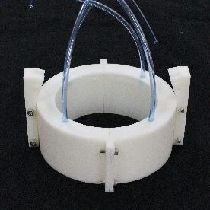
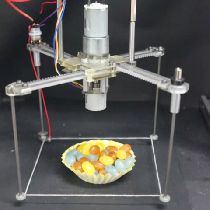
| 掬い込みバインディングハンド | 薄型平面シェルグリッパ | 包みグリッパ | ニードルグリッパ |
|
|
|
|
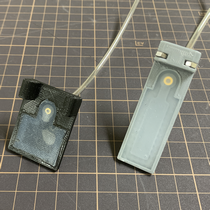
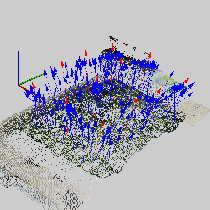
| 食品ハンドリング用ビジョン | 食品特性センシング | シェルグリッパ | バインディングハンド |
|
|
||
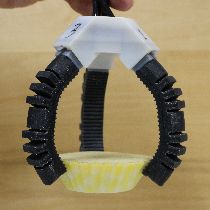
| プリンタブルハンド | プレストレッチ指ハンド |
 |
 |
 |
|
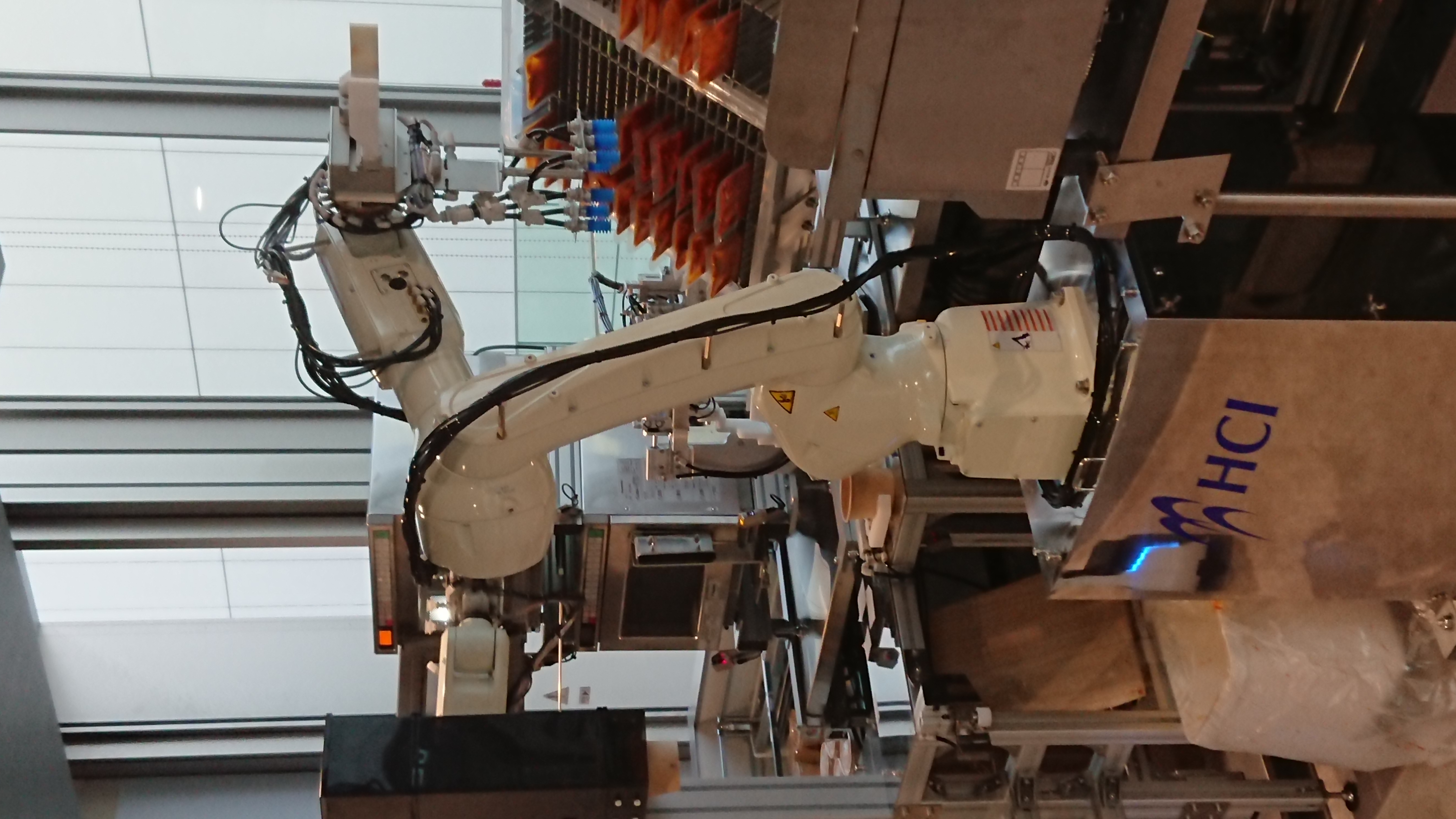
| SIP 実証実験室 | |||
| 2023/9/11 | RSJ2023のオープンフォーラム「食品把持ロボット向けの食品サンプル開発」で「ハンドリング評価のための食品サンプルに関する先導調査研究」と題して報告 |
| 2023/9/11 | RSJ2023のオープンフォーラム「ロボットの実用化に向けた先端技術の実証開発〜NEDO先導調査研究による搬送ロボットやマニピュレーションの実用化技術の成果報告〜」で「ハンドリング評価のための食品サンプルに関する先導調査研究」と題して報告 |
| 2023/6/7 | FOOMA Japan 2023 自動化推進プロジェクトで「原料投入」と題して講演 |
| 2023/6/6 | FOOMA APで「ばらつきを考慮した食品形状のモデリング」と題して発表 |
| 2023/4/7 | Team Ritsumeikan が RoboSoft 2023 Competition で準優勝 機友会ニュース |







|
|
| 2023/1/27 | 食品粉体技術分科会(日本粉体工業技術協会)で「ソフトロボティクスに基づく食品ハンドリング」と題して講演 |
| 2023/1/23 | 北海道立総合研究機構で「食品ハンドリングのためのロボットエンドエフェクタ」と題して講演 |
| 2022/11/22 | NEDO先導調査研究「ハンドリング評価のための食品サンプルに関する先導調査研究」が採択されました. |
| 2022/9/27 | ロボットレストランAI_SCAPEを体験しました. |




|
|
| 2022/9/9 | RSJ 2022 オープンフォーラム「食品評価サンプル規格標準化 ー食品ピック&プレイスロボットの技術向上を目指してー」で「食品の特徴に関する概念,性質」と題して講演 |
| 2022/9/1 | SIP公開シンポジウム in 広島「ロボット技術の新分野展開を可能とするエンドエフェクタとは? − ロボットエンドエフェクタの機構と知能 −」 |
| 2022/8/29 | IFTジャパンセクション講演会で「食品のロボットハンドリングに向けて」と題して講演 |
| 2022/8/24 | とやまロボティクス研究会で「食品ハンドリング ソフトロボティクスによるアプローチ」と題して講演 |
| 2022/6/7-6/10 | FOOMA 2022 アカデミックプラザ「フードロボットチャレンジの試み」 |



|
|
| 2022/5/26 | ワイン注ぎロボットコンテスト |



|
|
| 2021/6/11 | ワイン注ぎロボットコンテスト |


|
|
| 2021/6/9 | 株式会社キャンパスクリエイトの第8回オンラインセミナーで食品ハンドリング用ソフトハンドと題して講演 |
| 2021/6/3 | 2021 美味技術学会シンポジウム 次世代の食産業と美味を支える革新的テクノロジーで「食品×ロボット:ソフトロボットハンドによる食品ハンドリング」と題して講演 |
| 2021/6/1-6/4 | FOOMA 2021 アカデミックプラザで,薄型平面シェルグリッパと掬い込みバインディングハンドを紹介 |
| 2020/12/3 | Forum on Robotic Food Manipulation Challenge at IEEE/RSJ IROS 2020 |
| 2020/11/28 | 第6回SICEポストコロナ未来社会ワークショップ「ソフトロボティクスが革新するニューノーマル」で,「ソフトハンドで変わる製造業のニューノーマル」と題して講演 |
| 2020/10/8 | ロボットコンテスト ワイン注ぎロボットコンテスト 食品ハンドリングコンテスト |



|
|
| 2020/9/28 | SIP公開オンラインシンポジウム ―これからの食産業と食文化に科学と技術は貢献できるか― で,食品用ソフトグリッパと題して講演 |
| 2020/5/26 | Keynote Speech Soft Robotic Approach to Food Material Handling at 2020 Asia-Pacific Conference on Robotics and Autonomous Systems (APCRAS 2020) |
| 2020/4/24 | 「ソフトグリッパによる柔軟物ハンドリングへの試み」と題して第125回 ロボット工学セミナー「物流ロボットにおける物体ハンドリング技術最前線」で遠隔講演 |
| 2020/2/18 | 食料品製造業の課題解決を考えるワークショップ |
| 2020/1/8 | 食品 x ロボティクス ディスカッション |
| 2019/7/11 | 国際食品工業展アカデミックプラザでAP賞(来場者評価部門)を受賞しました. |





|
|
| 2019/7/10 | Presenting "Food Material Handling by Soft Robotic Hands" at International Mini-Symposium organized by Japan Society for Food Engineering |
| 2018/6/14 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. |





|
|
| 2017/6/15 | 国際食品工業展アカデミックプラザでAP賞 グランプリを受賞しました. (大学ウェブページ) |




|
|
| 2016/6/9 | 国際食品工業展アカデミックプラザでFOOMA AP(アカデミックプラザ)賞を受賞しました. |
| 予算 |
| 研究発表 |
| 関連サイト |
{kind=link}