

-210x210.png)
| Description |
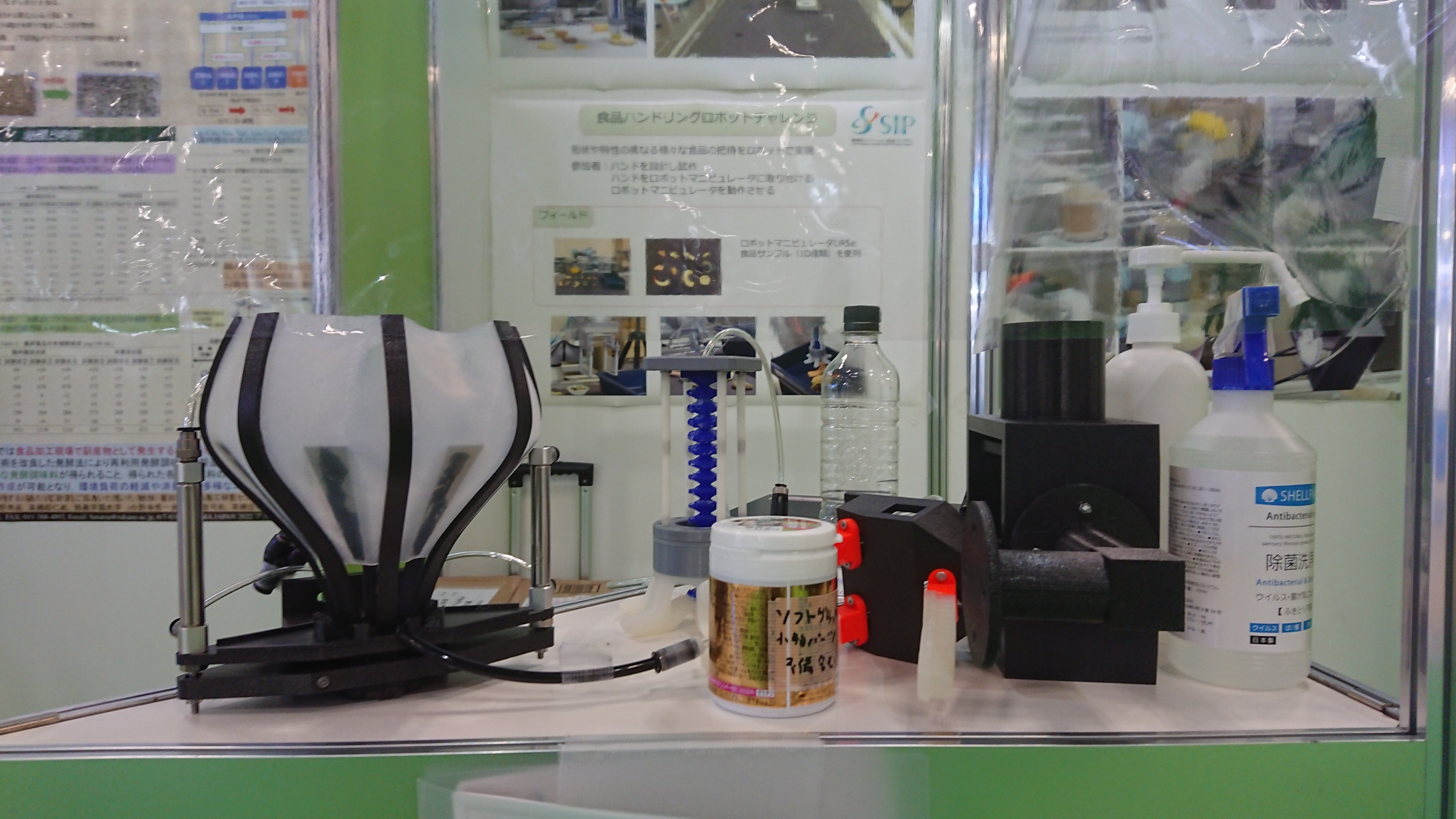
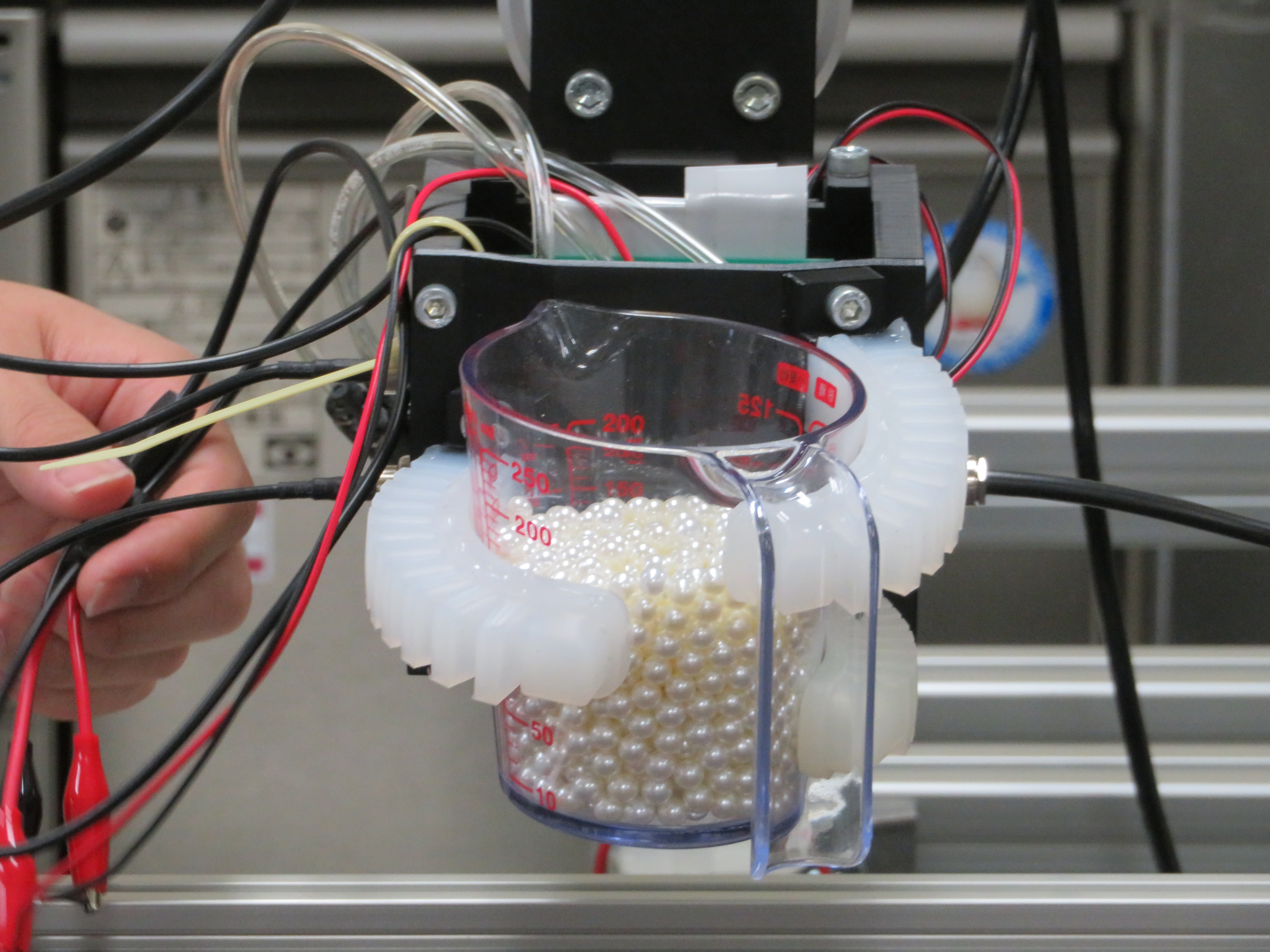
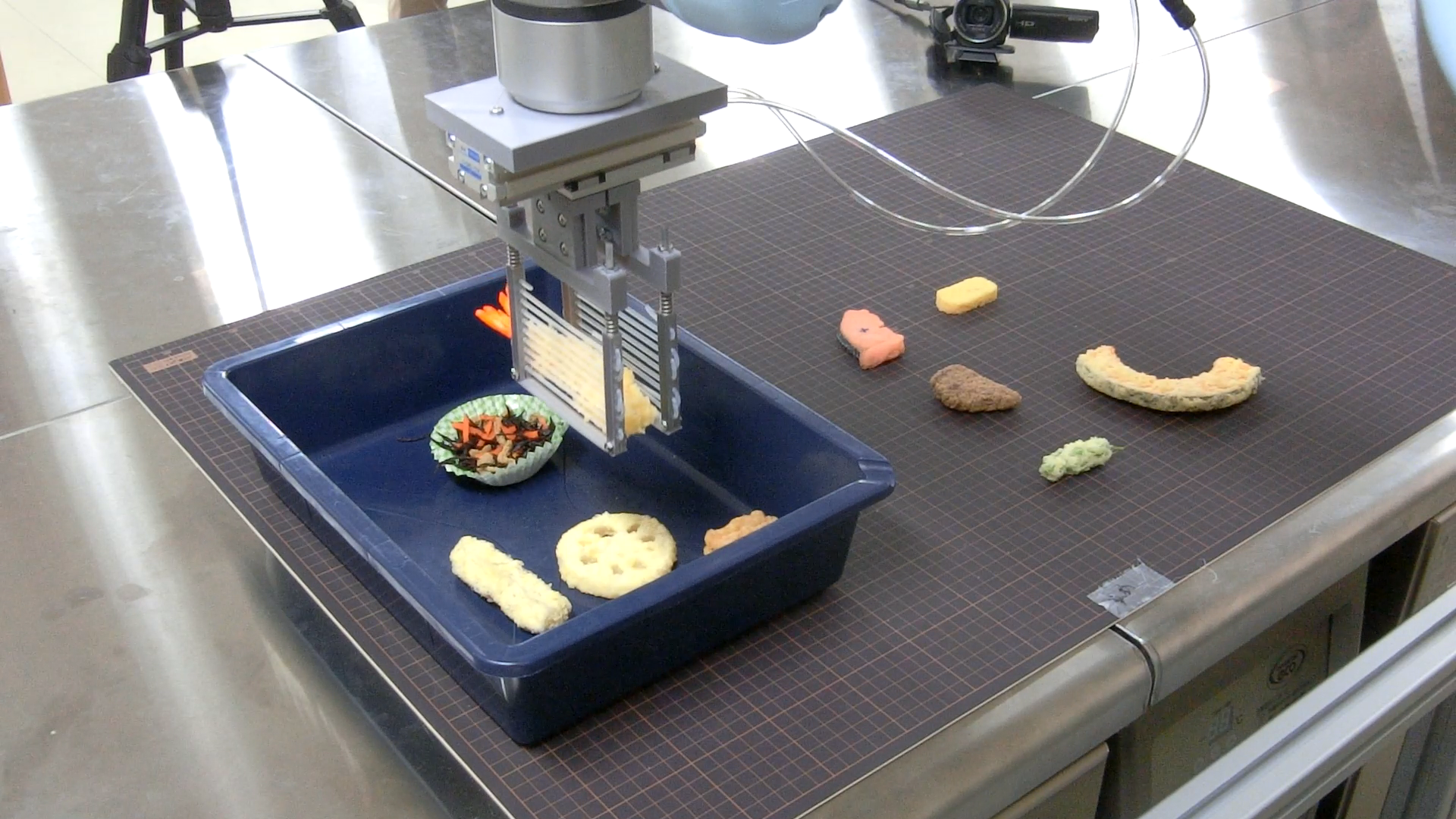
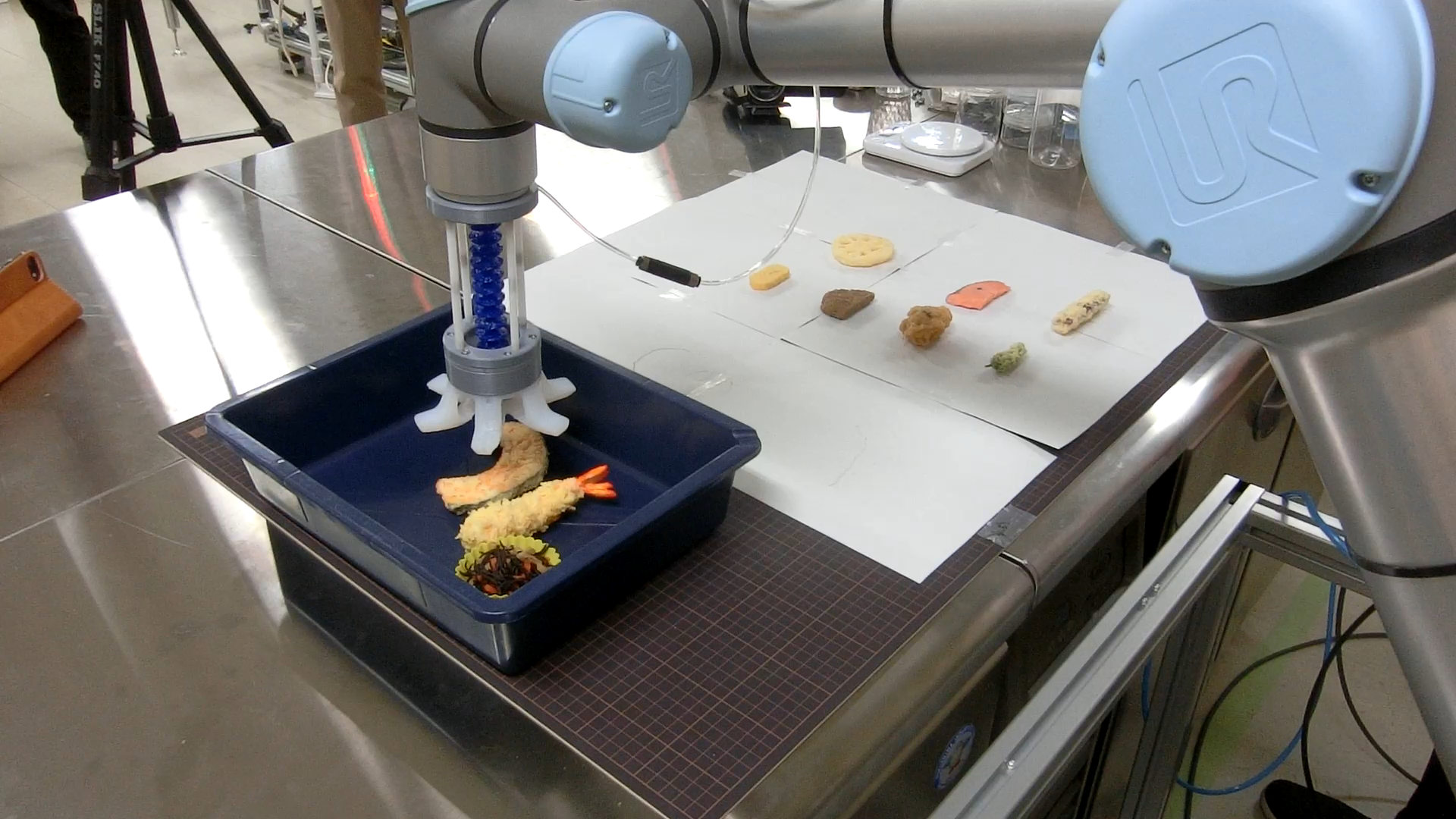
We will realize robotic food manipulation. To that end, we will conduct research on soft grippers for food handling, sensors for food handling, and measurement and modeling of food properties.
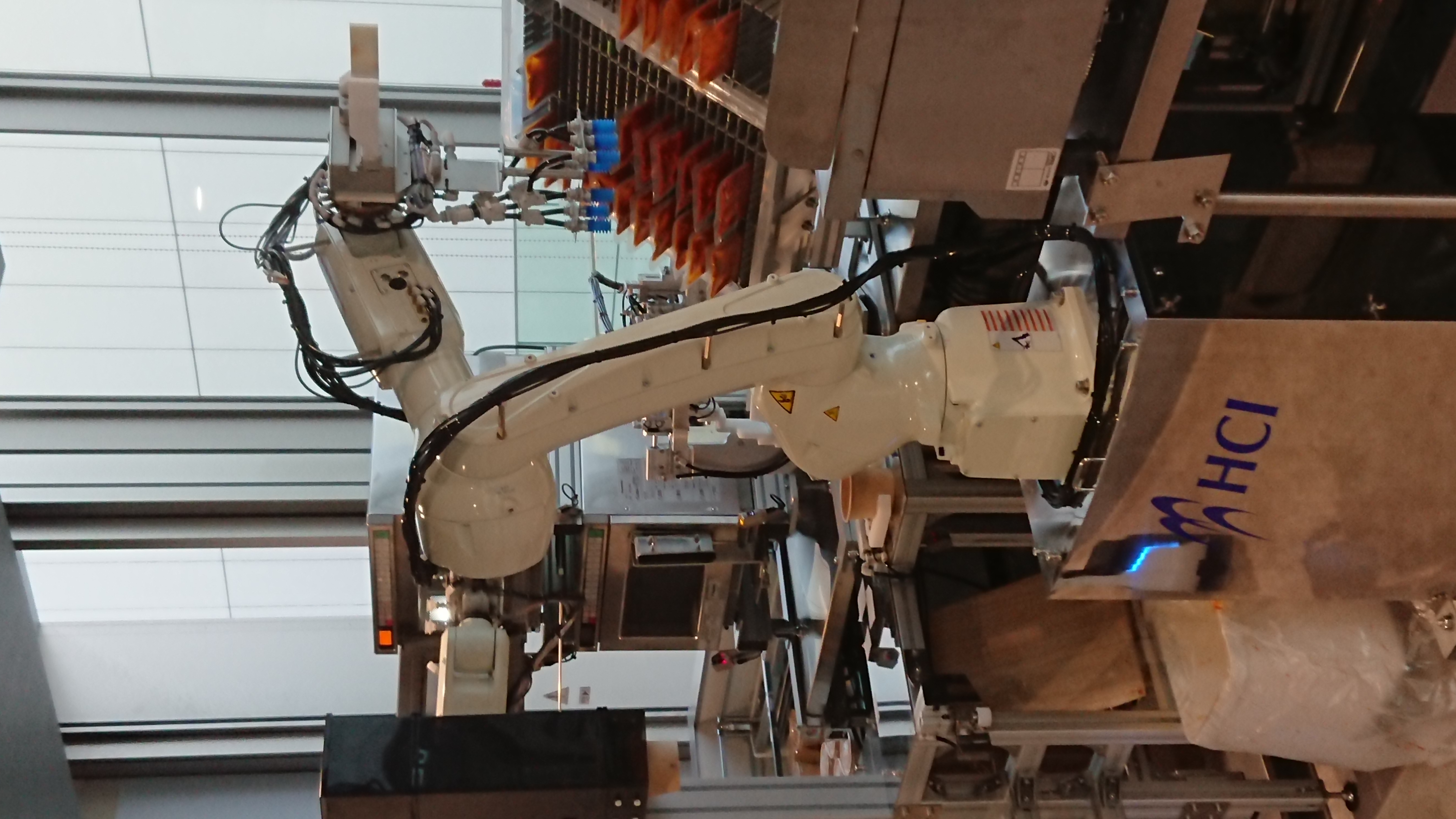
In Japan, several millions of lunch boxes are manufactured and sold per day. Currently, packing of food materials to lunch boxes is performed by human hands. Lunch box must be manufactured near the consumption area. However, due to labor shortage in recent years, automatic packing is strongly required. There is a strong demand for automatic packing of confectionery boxes and the sorting of agricultural and marine products with the recent shortage of human resources.
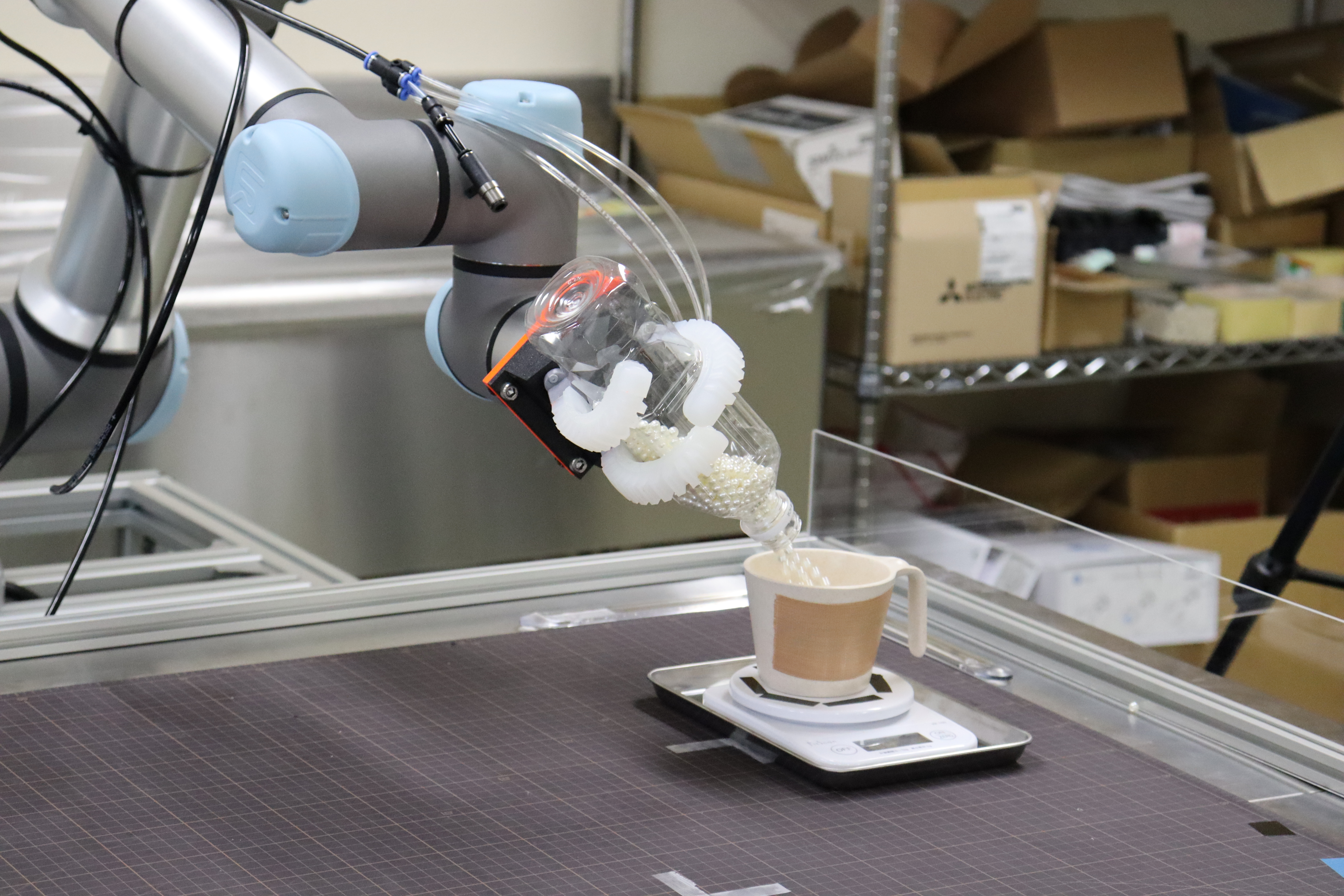
The reason why food handling is difficult is that many foods are soft, and the shape and properties of food materials vary much. One solution to cope to successfully perform handling despite of such variations is to introduce flexible materials such as elastomers and fibers into robot hands. In other words, by using a soft materials for the physical interface between robotic hands and food materials, robotic hands will be able to absorb such variations in shape and properties.
|
|
|
|
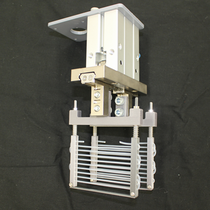
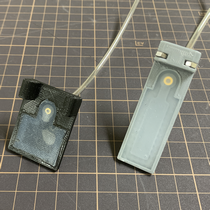
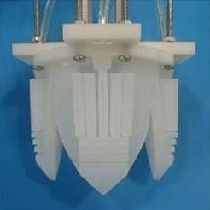
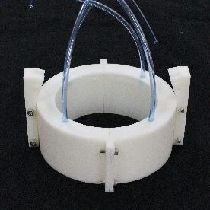
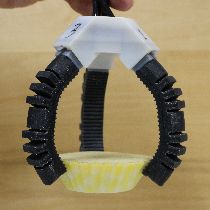
| scooping-binding hand | thin planar shell gripper | wrapping gripper | needle gripper |
|
|
|
|
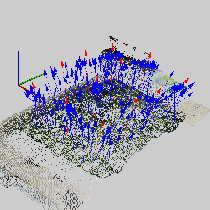
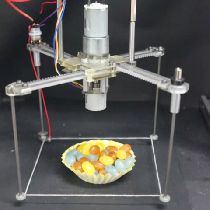
| vision for food handling | food property sensing | shell gripper | binding hand | |
|
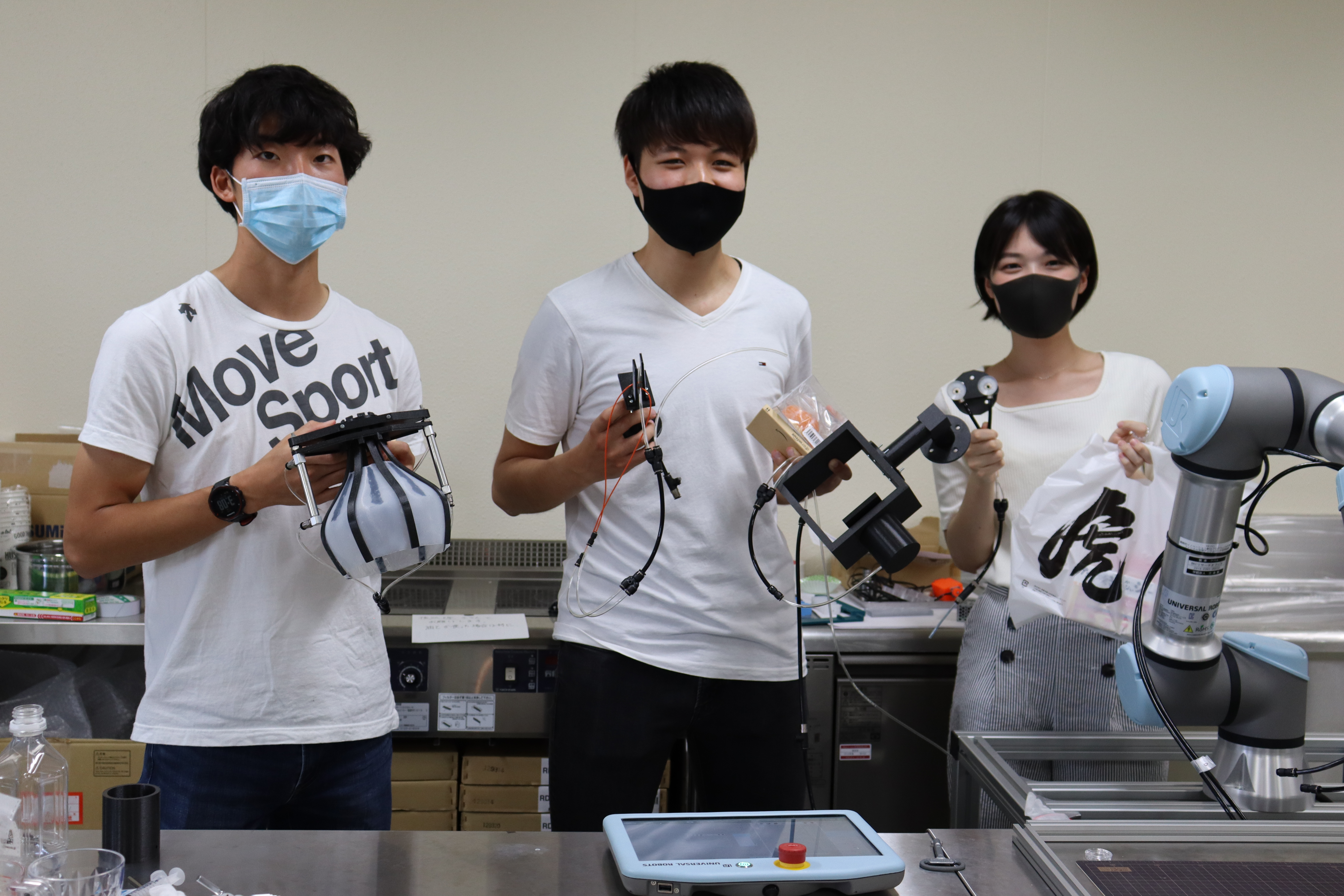
| printable hand | prestretched hand |
 |
 |
 |
|
| SIP demonstration room | |||
| 2023/9/11 | Reporting "Feasibility Study on Food Samples for Robotic Handling Evaluation" at RSJ 2023 Open Forum "Food Samples for Food Handling Robots" |
| 2023/9/11 | Reporting "Feasibility Study on Food Samples for Robotic Handling Evaluation" at RSJ 2023 Open Forum "Reports on Feasibility Study Programs for Practical Use of Robot Technologies" |
| 2023/6/7 | Presenting '' at FOOMA Japan 2023 |
| 2023/6/6 | Presenting 'Food Geometric Modeling considering Shape Variation' at FOOMA AP |
| 2023/4/7 | Team Ritsumeikan won second place in RoboSoft 2023 Competition Kiyuukai news (Japanese) |







|
|
| 2023/1/27 | Presenting 'Food Handling Based on Soft Robotics' at Food Process Technical Group (Association of Powder Process Industry and Engineering, Japan) |
| 2023/1/23 | Presenting 'Robot End-Effectors for Food Material Handling' at Hokkaido Research Organization |
| 2022/11/22 | Feasibility Study on Food Samples for Robtic Handling Evaluation was accepted by NEDO. |
| 2022/9/27 | Experienced robot restaurant AI_SCAPE |




|
|
| 2022/9/9 | Presenting "Concept in Food Properties" in an open forum at RSJ 2022 |
| 2022/9/1 | SIP Open Symposium in Hiroshima 'Towards End-Effectors Applicable to New Areas -Mechanism and Intelligence of Robotic End-Effectors -' |
| 2022/8/29 | Presenting "Toward Robotic Handling of Food" at IFT Japan Section Seminar |
| 2022/8/24 | Presenting "Food Handling - Soft Robotics Approach" in Toyama Robotics Study Group |
| 2022/6/7-6/10 | Food Robot Challenge Trials' in FOOMA 2022 Academic Plaza |



|
|
| 2022/5/26 | Robot Wine Pouring Challenge |



|
|
| 2021/6/11 | Robot Wine Pouring Challenge |


|
|
| 2021/6/9 | Presenting Soft Hands for Food Handling at the 8th online seminar organized by Campus Create Co., Ltd. |
| 2021/6/3 | Presenting "Food x Robots: Food Handling by Soft Robot Hands" at 2021 Japanese Society of Taste Technology Symposium on Innovative Technology for Next Generation Food Industry and Taste |
| 2021/6/1-6/4 | Introducing thin planar shell gripper and scooping-binding hand at FOOMA 2021 Acadamic Plaza |
| 2020/12/3 | Forum on Robotic Food Manipulation Challenge at IEEE/RSJ IROS 2020 |
| 2020/11/28 | Presenting "Soft Robotic Hands changing Manufacturing in New Noraml" in the 6th SICE workshop for Post Corona Future Society in Japan |
| 2020/10/8 | Robot Contest Robot Wine Pouring Challenge Food Handling Challenge |



|
|
| 2020/9/28 | Presenting Soft Grippers for Food Handling at SIP online symposium |
| 2020/5/26 | Keynote Speech Soft Robotic Approach to Food Material Handling at 2020 Asia-Pacific Conference on Robotics and Autonomous Systems (APCRAS 2020) |
| 2020/4/24 | Remote lecture on "Challenge to Soft Object Handling by Soft Grippers" at RSJ Robotics Seminar No. 125 on "Recent Object Recognition and Handling Technologies in Logistic Robots" |
| 2020/2/18 | Workshop on Problem Solution in Food Industry |
| 2020/1/8 | Discussion on Food x Robotics |
| 2019/7/11 | Received AP Award (visitors' evaluation) at International Food Machinery and Technology Exhibition. |





|
|
| 2019/7/10 | Presenting "Food Material Handling by Soft Robotic Hands" at International Mini-Symposium organized by Japan Society for Food Engineering |
| 2018/6/14 | Received AP Award Grand Prix at International Food Machinery and Technology Exhibition. |





|
|
| 2017/6/15 | Received AP Award Grand Prix at International Food Machinery and Technology Exhibition. (Univ. web page) |




|
|
| 2016/6/9 | Received FOOMA Academic Plaza Award at International Food Machinery and Technology Exhibition. |
| Budget |
| Publications |
| Related Sites |