|
水中生物操作
水中生物の操作に関する研究を進める.遊泳生物(ネクトン),浮遊生物(プランクトン),底生生物(ベンソス)に対して,環境との相互作用を利用して把持し,操作することを試みる.
|
|
|

|
食品サンプル
ハンドリングに影響を与える変形特性や摩擦特性等を再現した食品サンプルを試作し,食品ハンドリング実験に供する.
|
|
|

|
布地操作
布地を把持し操作するためのロボットハンドに関する研究を進める.重ねた布地から一枚一枚を分離して把持し,定置することを目的とする.
|
|

|
ベローズアクチュエータ
ベローズアクチュエータのモデリングを進めるとともに,様々な変形を実現するベローズアクチュエータを設計する.
|
|
|
|

|
食品形状の確率的モデリング
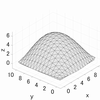
ばらつきを有する食品の形状を,確率的にモデリングする手法を確立する.食品は個々の形状のばらつきが大きく,食品マニピュレーションにおいてはこのようなばらつきに対応する必要がある.本研究では,食品のばらつきを確率的に表現する手法を確立する.
|
|

|
生物のフィジカルツイン
生物のハンドリングのために,生物の運動を模擬するフィジカルツインを構築する.生物を扱う作業の自動化に関する研究を進めるために,把持や操作の対象となる生物の実体モデルを構築する.
|
|
|

|
包みグリッパ
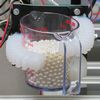
細断食品を把持するために,包みグリッパを提案する.包みグリッパは,空気圧で膨張する複数の指から構成される.空気圧を印加すると,指と指の隙間が少なくなるように指が膨張し,細断食品を把持することができる.
|
|

|
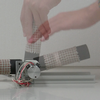
薄型平面シェルグリッパ
薄型平面シェルグリッパは,狭隘空間で食品材料を把持し,盛り付けるために開発された.狭隘空間に挿入できる薄い指を実現するために,構造と製法を新たに開発した.
|
|

|
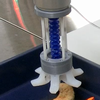
シェルグリッパ
柔らかく重量がある食材を把持するために,シェルグリッパを提案する.シェルグリッパは,硬い外殻の内側に空気圧で膨張する柔らかいチャンバーを有する.空気圧でチャンバーを膨張させることで,食材を把持することができる.
|
|

|
掬い込みバインディングハンド
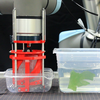
滑りやすく脆弱な食品を把持するために,掬い込みバインディングハンドを提案する.このハンドは,指の下方に配置された薄い弾性板で食品材料を掬い込みつつ,平行に張られた弾性糸で食品材料を把持することにより,食品を把持することができる.
|
|
|
柔軟膜のモデリングと設計
ソフトロボットで広く用いられている柔軟膜のモデリング手法を確立するとともに,柔軟膜の設計を試みる.
|
|
|
|
導電布地センサ
導電布を用いた近接センサに関する研究を進める.インフレータブルアームに巻くことができる導電布地センサを開発するとともに,寄生容量にロバストなセンシングアルゴリズムを構築する.
|
|
|
跳躍の力学
板バネを用いた跳躍機構において,エネルギーあたりの跳躍量が最大となる変形形状を求める.その変形形状を実現する機構を設計するとともに,跳躍の力学を解析し,跳躍を大きくするための原理を見出す.
|
|

|
ニードルグリッパ
本研究では,細断食品や粒状食品のハンドリングのために,突き刺しと把持という二つの動作が可能なグリッパを提案する.ニードルグリッパにおいては,チャンバーの表面に針が装着されている.チャンバー内の空気圧を制御することで,二つの動作を実現することができる.
|
|
|

|
マイクロ流体弁
本プロジェクトの目的は,小型軽量な空気圧比例弁を開発することである.空気圧人工筋に埋め込むことが可能なサイズと重量,空気圧人工筋を駆動する圧力0.5 MPaで流量5 l/min程度の空気圧を制御することが可能なマイクロ比例制御弁が目標である.
|
|
|
ジャミングハンド
ジャミングハンドを用いた脆弱物ハンドリングに関する研究を進める.
|
|
|
|
|
|
|
|

|
柔軟指の曲げセンシング
本研究の目的は,ポリマーセンサを柔軟指に埋め込み,指の曲げをセンシングすることである.センサ信号から,指の曲げ振動や把持の際の滑りを検出することを目指す.
|
|
|
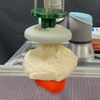
セパレートドライブグリッパ
本研究では,把持部と駆動部が空間的に離れたセパレートドライブグリッパを提案する.セパレートドライブグリッパを生物の把持に適用する.
|
|
|
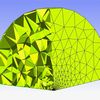
胸部の力学モデリング
本研究では,胸部の力学モデルを構築する.胸部の有限要素モデルを構築し,負荷に対する胸部の変形を計算する.
|
|
|
食品ハンドリングデータベース
本研究では,食品とロボットハンドを関連付けるデータベースを構築し,食品の変形特性や表面特性がロボットハンドによる把持に与える影響を体系化する.
|
|

|
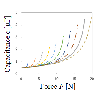
食品特性センシング
本研究では,食品の力学特性を非破壊的に計測する手法を提案する.食品に振動を与えることにより,食品の粘弾性特性を計測する.
|
|
|
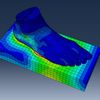
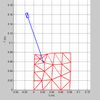
足の力学モデリング
本研究の目標は,偏平足の力学モデリングである.足内部の撮像結果から有限要素モデルを構築し,歩行と手術の力学シミュレーションを実現する.
|
|
|
食品ハンドリング用ビジョン
一定量の細断食品を把持するために,深度画像を用いて把持位置を推定する手法を提案する.深度画像と把持量のデータに機械学習を適用することにより,適切な把持位置を推定することを目指す.
|
|
-100x100.png)
|
プレストレッチ指ハンド
薄い食材の把持のために,あらかじめ外側に曲がっている指から構成されるプレストレッチ指ハンドを提案する.プリンタブルハンドの指を伸ばし,内側の面にフィルムを貼ることにより,プレストレッチ指を実現する.
|
|
|
静電容量型力覚センサ
目的とする物理量を計測可能な静電容量型センサに関する研究を進める.誘電体の構造を材料を設計することで,接触領域の面積に依存せず,作用力のみを検出することが可能なセンサを実現する.
|
|

|
プリンタブルハンド
本研究では,柔らかい材料を印刷できる3Dプリンタで,柔らかいロボットハンドを製作し,柔軟物体のハンドリングを実現する.
|
|
|
バインディングハンド
本研究では,バインディングという概念に基づいて,食品を把持しハンドリングするロボットハンドを提案する.バインディングにおいては,指の代わりに弾性糸により対象物を把持する.バインディングハンドは,変形しやすい食材入りのカップを把持し,箱にパッキングすることができる.
|
|

|
柔軟指先センサ
本研究では,ホール素子と永久磁石を用いて,ロボットハンドの柔らかい指先に埋め込むことができる,小型の力覚センサを構築する.
|
|

|
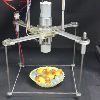
飛行ロボットによる接触作業
本研究では,対象との物理的な相互作用を伴う作業を実行する飛行ロボットシステムを開発する.飛行ロボットにエンドエフェクタを装着し,林業における枝打ち,高層ビルの窓の清掃,構造物の打音試験などの作業を実現する.
|
|

|
空中枝切り
本研究では,飛行ロボットを用いて高所の枝切りを実現することを目指す.ねじりグリッパーにより,飛行ロボットを枝に固定し,工具で枝を切る手法を提案する.
|
|

|
食品ハンドリング
本研究の目的は,ロボットによる食品の自動ハンドリングを実現することである.食品のハンドリングにおいては,精度を要求しない代わりに,形状や位置のバラツキに対応する必要がある.ケージングを基礎として,バラツキに対応できるロボットハンドを設計し,食品の自動ハンドリングを実現する.
|
|

|
食品モデリング
本研究の目的は,食品の力学モデルを構築し,加工や咀嚼の過程をシミュレーションすることである.和菓子を造る過程をシミュレーションすることを目標とする.
|
|
|
柔軟指操作
本研究の目的は,柔軟な指先を有するハンドにより,物体を安定かつ器用に操作することである.リアルタイムビジョンで物体の位置と姿勢を,タクタイルセンサで把持力を計測し,フィードバックすることで,物体の安定把持と物体操作を実現する.制御則の構築と柔軟指先のモデリングを進める.
|
|

|
面状曲げセンサ
本研究では,面の曲げ変形を計測するセンサを提案する.複数の導電パターンからのセンサ値から,面の曲げ変形をリアルタイムで推定する.
|
|

|
繊維センサ
本研究の目的は,感圧導電糸を用いた変形センシングである.
|
|
|
指の力学モデリング
本研究では,指の力学モデルを構築する.MRI撮像から指の組織を識別し,指の有限要素モデルを構築する.モデルのダイナミクス解析を通して,ヒトの触知覚を理解することを目指す.
|
|

|
滑り覚センサ
本研究では,滑りを検知するセンサを構築する.導電性繊維を用いた布地センサや柔軟指に埋め込んだ加速度センサ等を用いて,初期滑りの検出やテクスチャの識別を実現する.
|
|

|
移動跳躍ソフトロボット
本研究の目的は,転がりと跳躍により空間内を移動するロボットを開発することである.ロボットは,柔らかいボディとソフトアクチュエータから構成されており,ボディの変形により転がり跳ねることができる.
|
|

|
テンセグリティロボット
本研究の目的は,テンセグリティ構造の変形により移動するロボットを開発することである.硬い圧縮材と柔らかい張力材から構成されるテンセグリティ構造をボディとし,ボディの変形により移動することができる.
|
|

|
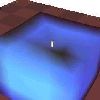
水中ビジョン
本プロジェクトでは,水中で対象を検出し,追跡するビジョンシステムを構築することを目的とする.光学特性が空中と異なり浮遊物が多い琵琶湖の水中で,魚を検出し追跡することが目標である.
|
|

|
帯状物体操作
本研究は,フラットケーブルやフレキシブル基板に代表される帯状物体の操作を実現することを目的とする.視覚を通して物体の力学特性を推定し,マニピュレータの軌道を制御することにより,帯状物体を操作する.
|
|
|
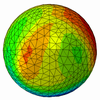
眼の力学モデリング
本研究では,眼の硝子体の力学モデルを構築する.硝子体内部を移動するマイクロロボットによる力と変位の計測値から,硝子体の変形パラメータを推定し,硝子体の有限要素モデルを構築する.
|
|

|
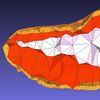
肝臓モデリング
本研究の目的は,生体組織の内部の変形計測を基にして,非一様な特性を示す生体組織の力学モデルを構築する手法を確立することである.CTやMRIによる内部変形計測から変形場を求め,力学パラメータを推定する.
|
|

|
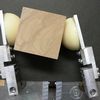
マイクロ振動輸送
本プロジェクトの目的は,チップコンデンサやチップ抵抗などのマイクロパーツの振動輸送を実現することである.非対称な表面(のこぎり歯表面)と対称な振動(正弦波)により,マイクロパーツの一方向の輸送を実現する.慣性力,摩擦力,凝着力,静電力を考慮したマイクロパーツのダイナミクスの解析を進める.
|
|

|
線状物体ハンドリング
本研究の目的は,機械システムによる線状物体のハンドリングを実現することである.線状物体モデリングの技術を基礎にして,変形を利用しつつハンドリングを達成する制御方策を探る.
|
|

|
帯状物体モデリング
本研究は,フラットケーブルやフレキシブル基板に代表される帯状物体のモデリング技法を確立することを目的とする.微分幾何法により任意の曲げとねじりを表現できる手法,モデルパラメータを推定する手法に関する研究を進めている.
|
|
|
穿刺シミュレーション
本研究の目的は,穿刺手術のシミュレーションである.メッシュ分割が不必要なシミュレーション技術とともに穿刺における力学パラメータを推定する手法を確立する.
|
|

|
CMOS+FPGAビジョン
本プロジェクトでは,CMOS+FPGAビジョンシステムを開発し,高速(1msec)で高解像度(1000×1000画素)のビジュアルフィードバックを実現する.CMOSイメージセンサで連続画像の高速な撮像を,FPGAに実装したビジョンアルゴリズムによりリアルタイムで画像特徴を計算し,ビジュアルフィードバックを実現する.
|
|

|
ソフトインターフェース
本研究の目的は,ソフトインターフェースを有する機構の制御を確立することである.柔軟物の運動と変形の同時制御,Loosely Coupled Jointの制御を通して,ソフトインターフェースを有する機構の制御の特質を解明する.
|
|

|
布地展開
本プロジェクトの目的は,布地の広げ操作を実行する機械システムを構築することである.布地の広げ操作は,把持,展開,定置から構成される.つまみ滑りを用いた布地の展開操作に関する研究を進める.
|
|
|
仮想レオロジー物体
本研究の目的は,VR空間内にレオロジー物体を構築し,レオロジー物体を触るときに生じる感覚を実現することである.レオロジー物体のリアリティベースモデリング,CTと超音波画像によるレオロジー物体の内部変形センシング,レオロジー変形のハプティック提示に関する研究を進める.
|
|

|
線状物体モデリング
本研究は,コードやチューブに代表される柔軟線状物体のモデリング技法を確立することを目的とする.微分幾何法により,任意の曲げ,ねじり,伸縮変形を表現できる手法を開発している.
|
|

|
FPGAベースビジョン
本プロジェクトの目的は,FPGA上にビジョンアルゴリズムを実装し,リアルタイム性,フレキシビリティ,コストパフォーマンスが高いビジョンシステムを実現することである.マッチトフィルタ法,位相限定相関法,ハフフーリエ変換法等をFPGA上に実装し,リアルタイム性とロバスト性の高い画像照合システムを構築する.
|
|

|
三次元イメージング
本プロジェクトの目的は,可変焦点ミラーを用いた三次元イメージングである.可変焦点ミラーを用いて焦点が異なる画像を取得し,Shape-from-Focus の技術を用いて全焦点画像や三次元形状をリアルタイムで得ることを目標とする.
|
|

|
変形空気圧アクチュエータ
本プロジェクトの目的は,空気圧によるゴムチューブの変形を用いるアクチュエータを開発することである.ゴムチューブに拘束を埋め込み,単一運動チューブ(SMT)を実現する.さらに,複数のSMTを組み合わせ,空気圧群アクチュエータ(PGA)を構成する.
|
|

|
布地位置決め
本研究の目的は,布地上の複数の点を位置決めする作業における作業方策ならびに制御則を導くことである.このような作業を,複数の操作点を持つ分布型アクチュエーションシステムにより実現する.
|
|

|
紙葉類ハンドリング
本研究の目的は,重なっている複数枚の紙葉類を分離し,整列させる機械システムを構築することである.吸圧ホール群を制御することにより,複数枚の紙葉類の分離,繰り出し,整列,順序入れ替えを実現する.
|
|

|
触視覚ベース把持操作
本研究の目的は,触覚と視覚を用いて,柔軟物を安定に把持し,ロバストに操作することである.タクタイルフィードバックにより,把持力を制御することにより安定把持を実現し,ビジュアルフィードバックにより,代表点の位置を制御することにより操作を実現する.
|
|

|
レオロジー物体成形制御
本研究の目的は,生地,ペースト,ゼリーに代表されるレオロジー物体の成形を機械システムで実現することである.レオロジー物体の成形を自動化するために,レオロジー物体成形機械とビジョンを用いる成形制御則を開発する.
|
|

|
視覚ベース物体ハンドリング
本プロジェクトでは,テーブル上を高速で運動する物体を把持し,操作する機械システムを開発する.リアルタイムビジョンモジュールと7軸マニピュレータをリアルタイムネットワークARCNETで接続し,ハンドリングを実現する.
|
|

|
人間技量の獲得
本研究の目標は,人間の物体操作技量を実験を通して抽出し,それを機械システムに移植することである.ホースを蛇口に差し込む作業に対して,作業の分析と計測,マニピュレータへの移植を進める.
|
|

|
人体上肢モデリング
本プロジェクトの目標は,人間の筋骨格モデルを構築し,人間の動作を分析することである.特に,人間の肩の運動に着目し,肩の運動学モデルを構築することを目指す.
|
|

|
力制御の設計と学習
本研究の目的は,組立作業に適合する適切な力制御パラメータを決定する手法を確立することである.特に,ダンピング制御則を対象とし,アドミタンス行列と指令径路を,設計する手法を確立する.
|
|

|
インパルスソータ
本研究では,高速な搬送が可能で,柔軟性を有する新しい搬送機器として,インパルスソータを開発する.衝突と空気圧浮上を利用してソーティングを実現するメカニズムを開発し,その制御則を構築する.
|
|
|